
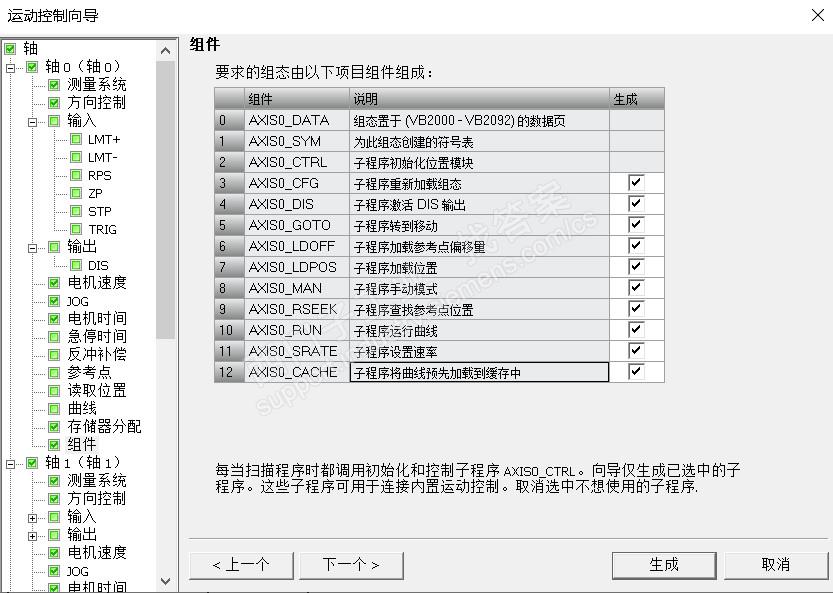
1.我们这边设备伺服用的是富士,PLC用的是200 SMART,但是我看程序里只用了AXISx_CTRL、AXISx_MAN、AXISx_GOTO三个子程序,其它几个子程序什么时候用?
2.这边设备回零点用慢速返回到原点接近开关,当接近开关触发,刹车动作,以这个位置为原点,这个和用回原点子程序哪个准?
3.现在,同步带老是跳齿,换了皮带还是这样,请问这是什么问题呢?
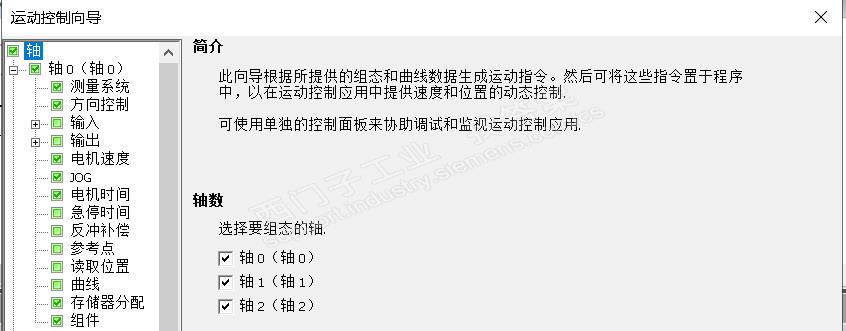
4.第二个截图中,其它的配置什么时候用到呢??
非常感谢!
图片说明:
最佳答案
1.其他子程序也许你一直都没有用。它把功能都做出来,用不用,由你选择。不用的可以不打钩。
2.这个当然是回原点子程序准。你触发然后才停电机那么过冲是必然的。你的程序在原点触发瞬间有没有先记录当前坐标?记住了的话就算过冲也可以拉回来。
3.无法分辨你是电气因素还是机械因素。
4.(续)不打勾的程序里面就不生成这个子程序了。
提问者对于答案的评价:
非常感谢!
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc360847.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 