
通过运动控制指令 "MC_POWER" 的输入参数可以使能或者锁定一个轴工艺对象。在设置参数"Enable" 为1之前,传感器(编码器)和执行机构(驱动设备)都必须处于可用状态。原因是CPU的启动速度通常比连接的IO信号快,在大多数情况下,在CPU启动之后,工艺对象无法立即启用。
检查工艺对象的可用性
你可以通过变量"CommunicationOK" (数据类型是BOOL)来检查轴工艺对象的完整可用性,"CommunicationOK" 在以下的数据结构中:
- Sensors (encoders) TO_Struct_StatusSensor
- Actuators (drives) TO_Struct_StatusDrive
特殊点:
- TO_ExternalEncoder: 没有执行机构(驱动设备).
- TO_SpeedAxis: 没有传感器(编码器).
下面的实例显示了一个轴工艺对象的DB编辑器里包含两个结构体变量"statusSensor"和"statusDrive",并且这两个结构体变量都包含 "CommunicationOK"。
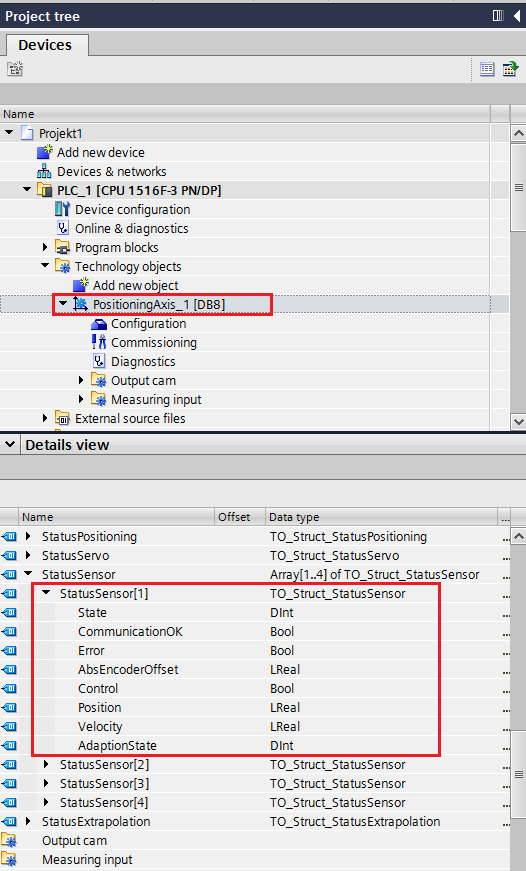 图1
图1
触发"MC_Power"的程序示例
触发运动控制指令 "MC_Power"的输入参数 "Enable" 可以按照如下的方法做:
只有轴工艺对象相应的传感器(编码器)和执行机构(驱动设备)都处于可用状态,轴工艺对象才能被使能信号("DB".enable)使能。

图2
在调用指令之前你需要复制数据(使能传感器和执行器)到数据块的变量里。
注意
如果在传感器和执行器接口参数(".CommunicationOK")为1之前使能轴工艺对象指令"MC_Power",那么取决于组态,可能会有报警信息,例如 "Encoder driver/actuator driver not initialized during startup"或者 "Adjustment caot be restored"。
更多信息
关于运动控制指令"MC_Power" 的更多信息请参考手册MC_Power.
安全性信息
为了防止工厂、系统、机器和网络受到网络攻击,需要实施并持续保有全面、先进的工业信息安全概念。西门子的产品和解决方案只是此概念的其中一个要素。更多有关工业信息安全的信息,请访问
http://www.siemens.com/industrialsecurity.
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc342624.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫