
描述
下面显示IM 174 与T-CPU或者 SIMOTION 连接时如何参数化使之能够连接无编码器反馈的步进电机驱动器。
本FAQ 以下列参数的步进电机为例。
| 最大转矩 | Mm [Ncm] | 1500 |
| 保持转矩 | MH [Ncm] | 1695 |
| 转子转动惯量 | JR [kgcm²] | 16 |
| 步进数 | z [1/U] | 1000 |
| 步进角 | a[°] | 0,36 |
| 额定电流/电缆 | Iw [A ] | 4,75 |
| 电阻/绕组 | Rw [Ώ] | 1,9 |
| 电流上升时间 | t [ms] | 22 |
| 重量(近似) | G [kg] | 11 |
| 电机电压 | U [V] | 325 |
表 1:样例步进电机的技术参数 n
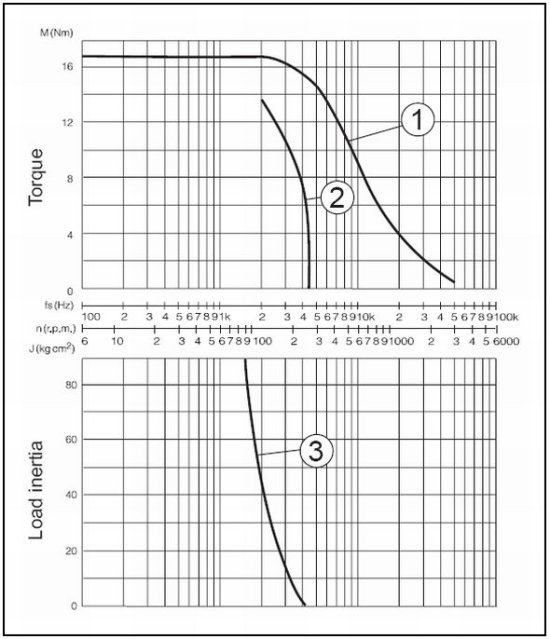
图. 01: 样例步进电机的特性n
要点:
- 最大转速时的最大转矩特性n
- 启动-停止特性(启动频率与负载转矩有关)n
- 负载转动惯量特性
第1步: 理解步进电机的图表
工艺所需的最小转矩基于应用/机械。对照所需的最小转矩和步进电机特性可以决定最大频率,在该频率内步进电机可以启动并提供所需的转矩。
在该例子中假定应用所需的转矩是10Nm。该例中使用的步进电机最大允许转矩是 15 Nm,因此满足要求。步进电机每转1000步。 确定最大频率(fmax)时,在 10 Nm 划一个水平线与曲线1交叉来确定与转矩相匹配的频率或速度。在此情况下 10Nm对应 fmax=9000Hz.
额定频率(fNorm)用同样的方式确定(最大转矩 15Nm对应 4500Hz到 5000Hz): fNorm= 5000Hz

图. 02:确定最大频率n
第2步:在硬件组态中设置
当在硬件组态中参数化 IM174 时,对上面描述的步进电机必须做下面的设置。n
| 参数 | 值 | 描述 |
| 驱动类型 | "Stepper" | 选择驱动类型:步进电机 |
| 最大频率.[Hz] | 9000 | 从步进电机的图表中确定最大频率fmax |
| 额定频率.[Hz] | 5000 | 从步进电机的图表中确定额定频率fNorm |
| 编码器类型 | "Stepper" | 选择编码器类型:步进电机 |
| 高精度的保留位 | 0 | 高精度 |
表 2:IM174 硬件组态 (HW Config) n

图. 03: IM174 硬件组态 (HW Config)n
第3步:计算电机最大转速
从特性中确定最大步进频率;使用公式 =1/z*fs (z = 步进数, fs= 步进频率)可得到最大速度:
max = 1/1000 * 9000 Hz = 9 U/s = 540 U/min
第4步:计算电机额定转速 (额定转速)
从特性中确定5000Hz 额定频率;使用公式 =1/z*fs (z = 步进数, fs=步进频率)可得到额定速度:
Norm =1/1000 * 5000 Hz= 5 U/s = 300 U/min
第5步:在 S7 工艺中设置
必须在 S7T Config / SIMOTION Scout 中做下面的设置:
| 在轴配置中设置 | ||
| 参数 | 值 | 描述 |
| 最大电机转速[rpm] | 540 | 输入第3步中计算的速度值 nmax。 |
| 每转的编码器脉冲 | 1000 | 每转的步数(= 步进数) |
| 高精度 | 1 | 对于步进电机必须一直设为"1" 。 |
| 在专家列表 TO "Axis" 中的设置 (右键点击 >专家 >专家列表 > 配置数据) n
| ||
| 参数 | 值 | 描述 |
| SetPointDriverInfo. DriveData. maxSpeed | 540 | 检查第3步计算的最大转速nmax是否在此输入。 |
| SetPointDriverInfo. DriveData. ominalSpeed | 300 | 输入第4步计算的额定转速nNorm。 |
| SetPointDriverInfo. DriveData. speedReference | [1] nominal_value | |

表 3:S7工艺或者SIMOTION Scout 中的工艺对象参数 n
第6步:关闭控制来检查轴是否工作正常
只要位置控制器激活则必须纠正程序中的错误。在位置控制器不激活且对轴进行位置控制的情况下才能进行参数的检查。
为了对工艺对象轴(TO)进行位置控制,在S7T Config/SIMOTION Scout轴的参数 (静态控制器参数)中将位置控制环的增益设为0.0,激活速度预控制的权重到100%.n

图. 05:关闭控制器来准备正常化检查n
第7步:正常化检查
正常化检查是控制轴运行到指定的距离。如果轴达不到目标位置且没有丢步,则正常化检查不正确并要使之正确。
第8步:优化位置控制器
现在必须重新激活和优化轴的位置控制器。请参考S7 工艺手册的指导(也用于控制回路放大和预控制) ,条目 ID 30119663,章节 8.4。
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc331887.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫