
n
在SIMATIC PCS 7系统的功能基础上进行了扩展的CEMAT系统可以满足水泥行业的任何需求。CEMAT保留了SIMATIC PCS 7的全部特性与功能,并新增了一些设备运行和故障诊断方面的管理功能,矿山行业标准MinAS V8.0符合采矿行业的特殊要求。CEMAT功能库中多数功能块带有报警消息,同时可以通过消息块进行消息扩展,并且能通过不同的方式屏蔽不必要的报警。
· 按照工厂层级对消息进行过滤:只有该层级足够权限的操作员才可看到这些报警;n
· 可以通过消息块的MsgEn=0将阻止来自模块的报警,例如在发生类似于电源故障的常见故障时,仅发出电源故障报警n
· 报警消息仅可在自动模式下创建,同时可以在通过驱动器管脚抑制消息块,在驱动器就地模式时不会创建报警消息。n
1. 功能块基础
CEMATV 8.0采矿行业标准001中消息块 C_ANNUNC(FB1004)可用来显示二进制过程信号的故障状态。这些信号可以是外部信号(如拉绳开关、偏移开关、液位开关或压力开关等)或内部过程条件(如丢失连锁)。可使用块图标来显示状态“过程信号正常”、“呈现过程信号”、“故障”和“未确认故障”。消息块可创建必须由操作员确认的故障或警告消息。可自由组态消息文本,对于非常重要的过程条件,可在一定时间之后重复报警消息,来提醒操作员。n
从项目的主数据库中调用该功能块,如下图所示:n

图 1‑1 C_ANNUNC功能块调用n
1.1 功能块IO说明
C_ANNUNC功能块的主要IO管脚如下图所示:n

图 1‑2 C_ANNUNC主要IO管脚说明n
C_ANNUNC常用管脚的功能描述如下表所示:n
表 1‑1 功能块常用管脚说明n
|
IO管脚 | 描述 | 应用 |
InSig | 输入信号 | =0时,功能块提示消息 |
ProcSig | 过程信号 | 监控过程信号,不触发消息,仅控制块图标颜色显示 |
DynFltEn | 动态显示 | =1时,块图标和面板上错误闪烁显示,=0时静态显示 |
GrFltLck | 组状态设置 | =1时,仅在C_ANNUNC上显示错误,在组功能块上不显示,但是在组功能块的Status call中显示该错误 |
GrStaLck | 组状态设置 | =1时,仅在C_ANNUNC上显示错误,在组功能块上不显示,在组功能块的Status call中也不显示该错误 |
MemTrip | 消息记忆 | =1时,在InSig由0à1之后,输出OutSig在该消息被确认后=1 |
MsgEn | 消息使能 | =0时,C_ANNUNC不再产生消息,(面板上显示报警) |
OutOnDTi | 延时时间 | InSig由1à0后,延迟OutOnDTi时间后才产生warning信息 |
OutOfDTi | 延时时间 | InSig由0à1后,延迟OutOfDTi时间OutSig才=1 |
WaDelTi | 延时时间 | Warning消息产生后延时WaDelTi产生alarm信息 |
RepTi | 重复时间 | Alarm信息重复触发的时间 |
GR_LINK | 组连接 | 将C_ANNUNC功能块划分到工艺组 |
O_LINK | 对象连接 | 将C_ANNUNC连接到驱动块, |
OutSig | 输出信号 | 连接至组功能块或者驱动块连锁管脚, |
1.2 功能块块图标和面板
在CEMAT V8.0中消息块C_ANNUNC可以使用6中不同的块图标,如下图所示:n

图1‑3 C_ANNUNC块图标n
C_ANNUNC的标准面板显示输入信号和输出信号的状态及延时时间,在标准面板上可以实现消息块的模式切换。消息块C_ANNUNC的标准面板如图1‑4所示;n
· SupOnDelT: 功能块使能输入管脚监控的延迟时间,即消息块从Oos模式切换到Auto模式或者SupOn由0à1时的延时时间。n
· OutSig OffDelTi:InSig由1à0后,延迟OutOnDTi时间后才产生warning信息,n
· OutSig OnDelTi :InSig由0à1后,延迟OutOfDTi时间OutSig才=1n
· WaDelTi:Warning消息产生后延时WaDelTi时间后产生alarm报警,且在InSig=0之后经过OutSig OffDelTi+ WaDelTi延时输出信号OutSig=0。n
· RepTi:Alarm信息重复触发的时间n

图1‑4消息块的标准面板n
在标准面板上可以实现操作模式切换,C_ANNUNC支持三种操作模式:自动、仿真、OoS。只有在自动模式下功能块才会监控输入信号的变化;仿真模式时不再监控InSig的状态,通过Feature.bit28设置输出信号OutSig的状态;OoS模式下会监控InSig但不会触发消息。与模式相关的Feature和OS_Perm如下表所示:n
表1‑2消息块与模式相关的Feature和OS_Permn
|
Featurebit | 功能描述 | 默认值 |
20 | 允许退出Oos模式 | False |
21 | 允许操作自动模式 | True |
23 | 使能模式切换 | True |
26 | 组连接GR_LINK用在模式状态反馈 | False |
OS_Perm | 功能描述 | 默认值 |
2 | =1运行切换到自动模式 | True |
3 | =1允许切换到OoS模式 | True |
15 | =1允许切换到仿真模式 | True |
诊断面板显示当前功能块的状态和参数值,并且在OS_Perm.bit31=1时(操作员需要有22权限)运行操作员修改功能块的时间参数。诊断面板如下图所示,n

图1‑5消息块的诊断面板n
Alarm 面板记录操作员记录和报警记录。操作员记录记录着操作员对数据的修改和模式的切换等操作,而报警记录着功能块触发的报警记录,包括报警进入、离开、确认。如下图所示:n
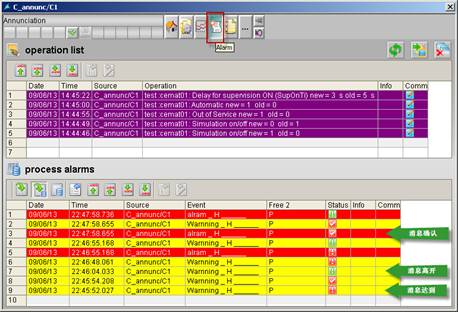
图1‑6消息块的报警面板n
1.3 DEMO的软硬件及测试环境
- 计算机操作系统Windows 7 Ultimate 64位英文版n
- PCS 7 V8.0 update1 英文版n
- CEMAT V8.0n
- CPU 417-4XL04 + CP443-1EX20
2. 功能块的基本控制
2.1 功能块连接
C_ANNUNC功能块输入信号InSig为结构变量,可以和APL库的驱动通道块直连,对于普通变量可以通过转换块连接。由于功能块的互锁丢失时不会触发消息,可以借助消息块实现互锁丢失时的报警和消息。如下图所示C_ANNUNC为组功能块互锁提供消息。n

图2‑1与C_GROUP互锁提供消息n
消息块可以配合APL的互锁功能块收集多个连锁信号,根据实际需求可以生成一个或者多个报警信息,如下图所示,通过O_LINK连接至驱动块。n

图2‑2为驱动块互锁提供消息n
在组功能块的Object list面板上显示组内的驱动块和消息块,并且将与O_LINK连接的消息块归属于驱动器。按照图2‑1和图2‑2的连接,组功能块的Objectlist面板如下图所示:n
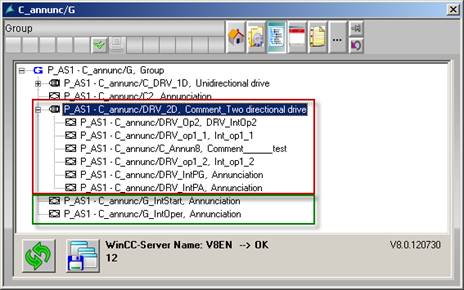
图2‑3组功能块Object list面板显示消息块n
可以根据实际情况自定义C_ANNUNC功能块的消息文本,如下图所示:n

图2‑4 C_ANNUNC消息编辑n
双击消息块后点击“Message..”按钮打开消息编辑界面,C_ANNUNC可以提供两个级别的消息:Warning-high和Alarm-high,在消息编辑界面可以输入自定义的消息文本。并且可以通过“More>>”按钮显示更多的消息内容,在“Additional text”中修改索引号5的内容,索引号5内容在CEMAT消息中显示为“Tag Comment”。n
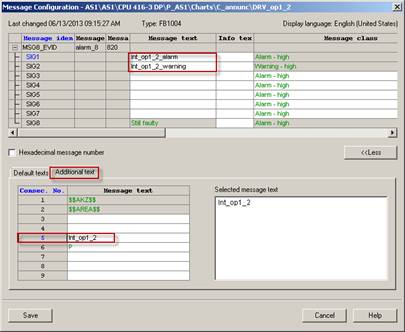
图2‑5 C_ANNUNC消息编辑n
当C_ANNUNC消息块触发消息后,会记录在功能块的ALARM面板上,同时也可以在PCS 7 的alarm logging和CEMAT Alarm Logging中记录查询到该消息,如下图所示:n

图2‑6 alarm logging中的消息n
2.2 Warn模式
在Feature.bit29=1激活C_ANNUNC功能块的warn模式。在warn模式下,C_ANNUNC功能块仅能产生Warning-high基本的警告信息,同时输出信号OutSig不会跟随输入信号InSig改变。即在warn模式下,即使输入信号InSig=0时输出信号OutSig也会保持=1。n
在warn模式下仍然会有OutSig OffDelTi和OutSig OnDelTi的延时,WarnTi和RepTi在warn模式下无效。随着输入InSig1的改变,功能块面板的变化如下图所示;n

图2‑7 Warn模式时面板延时n
2.3 Alarm模式
默认情况下消息块C_ANNUNC 功能块可以触发两个级别的报警信息:Alarm-high 和Wraning-high。需要注意只有在连接的驱动器已经运行后才会触发两个级别的报警消息。Alarm模式下报警过程如下图所示;n
- InSig 由1à0 后,开始OutSig OffDelTi延时计时;n
- OutSig OffDelTi延时结束之后,功能块产生wariing信息。同时开始WarnTi计时。此时在消息块和驱动块上都显示“W“报警,且驱动器正常运行;n
- WarnTi计时结束之后,输出信号OutSig=0,功能块产生alarm报警。在消息块和驱动块上显示“A“报警,且驱动器stop;n
- Repeat 计时,循环触发报警消息;n
- InSig由0à1后,开始OutSig OnDelTi延时,n
- 延时结束后,输出信号OutSig=1。需要对报警和消息进行确认,否则面板上会一直提示错误。

图2‑8 alarm消息n
2.4 典型应用
2.4.1 块图标显示字符
对于块图标类型5,可以在块图标和面板上显示2个字符。需要对OutSig管脚进行修改,如下图所示。n
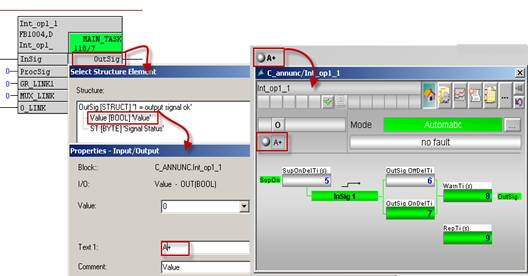
图2‑9块图标显示字符n
2.4.2 屏蔽消息
在有些时候,不需要触发报警,例如:组功能块未运行,路由未被选择,或者驱动器未运行,此时可以通过C_ANNUNC的部分IO管脚屏蔽。n
- SupOn:=0时不再监控输入信号InSig的变化n
- MsgEn:=0时禁止触发消息,此时会监控InSig的变化,面板上显示输入信号的变化和延时,但是不会触发warning和alarm信息。在alarm logging中
连接驱动器时可以通过Feature.bit16~18进行消息屏蔽,默认状态为Feature.bit=0。如下表所示。注意Feature.bit16和Feature.bit18不能同时为1,否则功能块会显示errorNum=29,而且消息块无法离开OoS模式。n
表2‑1 Featuren
|
Featurebit | 功能描述 | 默认值 |
16 | =1通过O_LINK激活 MsgTrigg | False |
17 | =1通过O_LINK激活 ActWarn | False |
18 | =1通过O_LINK激活 SupOn | False |
如下图所示,连接驱动块和消息块:RunSIgàActWarn,DynFlt取反àMsgTrigg,ContOnàSupOn,这样在驱动块未运行时不会触发消息报警。当然也可以通过其他的IO来屏蔽消息块的消息。n
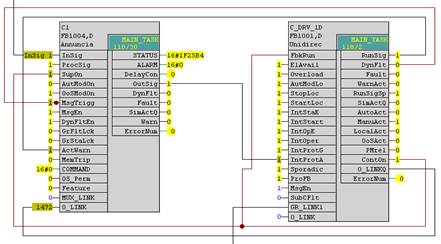
图2‑10消息块的消息屏蔽n
2.4.3 消息显示
同时对于部分消息,不需要在组功能块上显示C_ANNUNC的信息。此时可以通过消息块的管脚进行设置。n
· GrFltLck:=1时,仅在C_ANNUNC上显示错误,在组功能块上不显示,但是在组功能块的Status call中显示该错误n
- GrStaLck:=1时,仅在C_ANNUNC上显示错误,在组功能块上不显示,在组功能块的Status call中也不显示该错误
设置DRV_op1_1.GrFltLck=1, DRV_op1_2.GrStaLck=1后效果如下图所示,两个消息块的状态都不在组功能块上显示,而DRV_op1_1的消息可以再Status call中显示。

图2‑11消息状态显示
通过管脚DynFltEn控制消息的显示。DynFltEn=1时消息未确认时在面板和块图标上闪烁提示,面板上提示“fault not acknowledged“,确认后不再闪烁。经过RepTi时间后重新闪烁提示。DynFltEn=0时面板和块图标上不再闪烁提示,面板上显示错误提示,在块图标上静态显示“A”和“W”。

图2‑12消息确认
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc328952.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫