
n
1. Travel to Fixed Endstop功能简介
Travel to Fixed Endstop是用驱动器夹紧物体时所需的功能,使用该功能需要设定一个夹紧转矩,当夹具运行过程中碰到物体并且电机转矩到达夹紧转矩时,会维持夹紧状态,并返回一个状态值,以便进行下一步工序。
从中可以看出,Travel to Fixed Endstop功能的使用需要两个条件:n
- 位置轴处于运行中(Position Controlled Traversing)n
- 电机转矩到达设定的限幅值
2. Travel to Fixed Endstop功能使用
本文将以例子的形式,演示Travel to Fixed
Endstop功能的使用,本实例是基于SIMOTION
双轴DEMO箱建立的。n


图1 SIMOTION DEMO箱n
2.1准备条件
在使用该功能之前需要完成以下工作:
(1)完成驱动器的基本调试优化,可参考下载中心文档A0276,《SINAMICS S120基本组态》。
(2)为驱动器配置报文,其中必须包含转矩限幅到达(r2199.11)的信息(比如105报文),并完成位置轴Axis的配置,可参考下载中心文档A0309,《SIMOTION D435调试入门》。n
2.2设置参数
Travel to Fixed Enstop功能的实现需要用到驱动器转矩限幅的功能,所以需要保证SIMOTION与SINAMICS双方的转矩参考值一致。本例中使用Axis_2来实现Travel to Fixed Endstop的功能。 在SIMOTION软件左侧树形目录是依次打开D435AxisAxis_2,在Axis_2上点击右键,选择ExpertExpert List,依次打开Configuration data选项卡下的TypeOfAxisSetPointDriveInfoDriveDatamaxTorque(如图2所示),必须将maxTorque与驱动器的参数P2003,P1520三者设为一致,本例中全设为3.2Nm。n

图2 Axis Expert Listn
然后设置与Fixed Endstop相关的配置数据,从SCOUT软件左侧树形目录是依次打开D435AxisAxis_2Limits,右侧窗口的第三个选项卡是关于Fixed Endstop的设置。
Fixed Endstop Dectection,即判断夹具夹紧的检测方式,有两种方式:n
- Via following error
当转矩到达设定值,同时跟随误差到达设定值时,认为夹具夹紧。n - Via force/torque
当转矩到达设定值时,认为夹具夹紧。
本例采用Via following error的方式。跟随误差Following error和位置容差Position Tolerance采用系统默认值,如图3所示。n
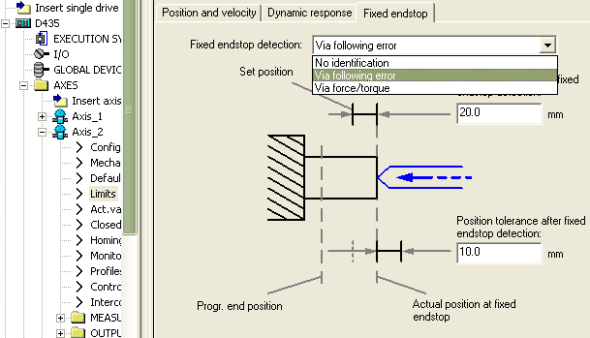
图3 Fixed Endstop的设置
2.3编写程序
以MCC为例,编写程序如图4所示。
其中Travel to Fixed Endstop功能块的设置如图5所示。其中ClampingValue可以设置转矩大小,单位为Nm。使用Stop Travel to Fixed Endstop可以退出该功能。
在使用MCC编程时,ClampingValue的单位要选择为%,其单位是Nm,比如设置ClampingValue=20%表示负载侧输出转矩为0.2Nm,系统会根据齿轮比自动计算电机侧输出转矩。
在使用ST编程时,可以调用_enablemovingtoendstop命令实现该功能,参数设置如下时,可以实现与MCC相同的功能。
myRetDINT :=
_enablemovingtoendstop(
axis := to.Axis_2
,clampingvaluetype := USER_DEFAULT
,clampingvalue := ClampingValue
//,nextcommand := IMMEDIATELY
//,commandid := (0,0)
,torquelimitunit := DEFAULT_UNIT
);
对于旋转轴,通过ST编程,可以直接对电机侧输出转矩进行设定。此时的参数设置如下:
myRetDINT :=
_enablemovingtoendstop(
axis := to.Axis_2
,clampingvaluetype := USER_DEFAULT
,clampingvalue := ClampingValue
//,nextcommand := IMMEDIATELY
//,commandid := (0,0)
,torquelimitunit := Torque
);

图4 MCC程序

图5 Travel to Fixed Endstop的设置
2.4运行状态监视
当激活Travel to Fixed Endstop的功能以后,位置轴的参数_to.Axis_2.movingtoendstopcommand.state会变成ACTIVE。通过_to.Axis_2.torquelimitingcommand.torquelimitingstate可以查看转矩限幅是否到达的状态。
当转矩限幅到达,且跟随误差到达后,_to.Axis_2.MovingToEndstopCommand
.ClampingState会变成ACTIVE,同时位置容差开始起作用,当轴退出±10mm的容差范围以后,转矩限幅被取消,ClampingState会变成INACTIVE。
激活Travel to Fixed Endstop以后,Trace到的状态曲线如图5所示。
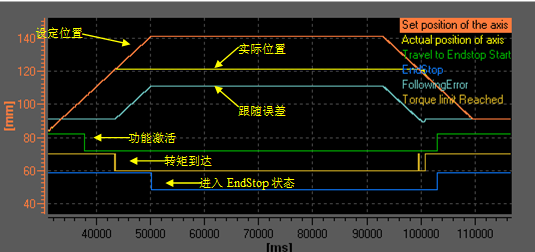
图5 Travel to Fixed Endstop状态监视
关于Travel to Fixed EndStop功能的更多资料,请参考SIMOTION的功能手册“TO Axis Electric / Hydraulic, External Encoder, Function Manual”中第2.16节。其下载地址如下:
27002093
关键词
SIMOTION,Travel to Fixed Endstop,使用入门
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc328404.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫