
n
应用描述
本文介绍了SINAMICS S120基本定位的监视功能。n
解决方案
1 概述n
SINAMICS S120在使用基本定位(Basic Positioner或称EPOS,Easy Positioner)功能时,系统提供了一系列的监视功能来对驱动器的运行状态进行监视。在驱动器使能以后,如果负载的实际位置r2521与设定位置r2665的偏差超过某门限值,就会有相应的错误信息产生(比如F07450(A),LR: Standstill monitoring has responded),并会带来相应的系统响应(比如驱动器OFF1停 车)。如果这些门限值设置的不合适,或者驱动器的特性优化得不理想,或者机械系统本身就有问题,就很可能会出现这些错误信息。在实际应用中,需要根据实际 情况去灵活调整,以完全发挥这些监视功能的作用。在有必要的情况下,也可以屏蔽某些错误或者修改错误响应方式,配置方法可以参考下载中心文档F0408。本文主要对监视功能的工作原理和可配置的参数进行介绍。n
SINAMICS S120提供的监视功能有:n
·定位监视Positioning Monitoringn
·零速监视Standstill Monitoringn
·跟随误差监视Following Error Monitoringn
在STARTER项目中,插入一个驱动(比如SERVO_02)并激活其基本定位功能后,在左侧项目导航栏中,依次打开 DrivesàSERVO_02àTechnologyàPosition ControlàMonitoring,可以打开监视功能配置画面,如图1所示。n
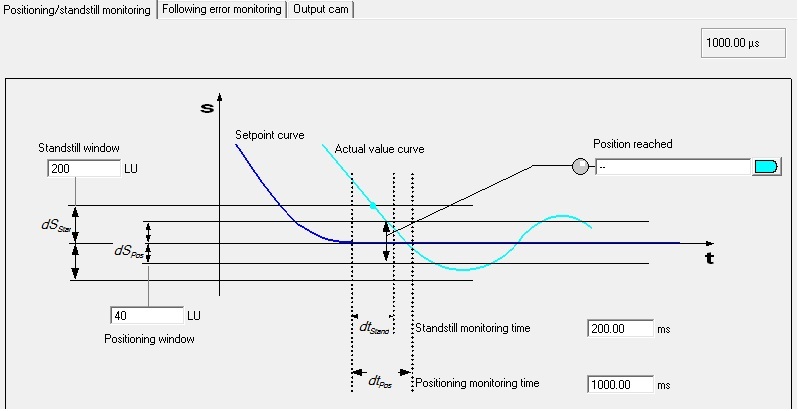 图1 监视功能配置画面n
图1 监视功能配置画面n
2 定位监视(Positioning Monitoring)n
在进行定位操作时,在位置设定值插补结束后,负载的实际位置开始被监视。该功能称为定位监视,但并不等于到达目标位置,而是实际位置进入一个范围内,称之为“定位窗口(P2544, Positioning Window)”,如图2所示。n
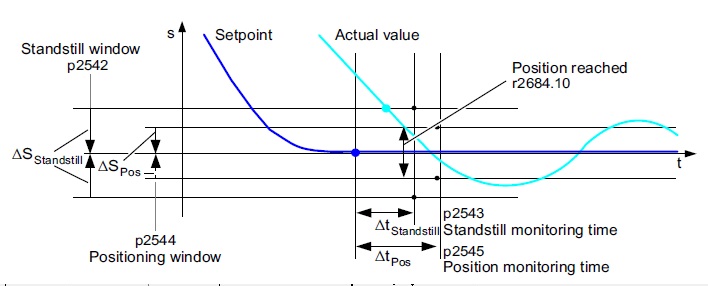
图2 定位与零速监视示意图n
监视过程如下:n
(1)在进行定位操作时,位置设定值插补完成后,图2中“定位监视时间”(P2545, Positioning monitoring time)定时器开始计时。n
(2)如果在“定位监视时间”内,位置实际值未进入定位窗口,系统会报“F07451(A),LR: Position monitoring has responded”错误,驱动器的默认响应是OFF1停车,定位监视功能也随之结束;反之则定位完成。n
实际应用中,可以根据实际情况调整P2544和P2545,以充分发挥定位监视的作用。如果定位窗口P2544设为0,那么定位监视功能被禁用。n
3 零速监视(Standstill Monitoring)n
在驱动器使能状态下,如果轴没有执行定位命令,或者位置设定值插补结束后,零速监视功能处于激活状态。与定位监视类似,零速监视有“零速监视窗口(P2542, Standstill window)”和“零速监视时间(P2543, Standstill monitoring time)”设置,如图2所示。零速监视错误“F07450(A),LR: Standstill monitoring has responded”被触发后,驱动器的默认响应是OFF1停车。n
有以下两种情况会触发零速监视错误:n
(1)在进行定位操作时,位置设定值插补完成后,位置实际值在“零速监视时间”内未进入“零速监视窗口”,系统会报F07450错误。n
(2)在驱动器使能状态下,没有执行定位命令时,实际位置离开“零速监视窗口”时,系统会报F07450错误。n
实际应用中,可以根据实际情况调整P2542和P2543,以充分发挥零速监视的作用。如果监视窗口P2542设为0,那么零速监视功能被禁用。n
4 跟随误差监视(Following Error Monitoring)n
在进行定位的过程中,负载的实际位置必然滞后于设定位置,两者之间有一个偏差r2563。跟随误差监视功能就是对这个偏差进行监视,如图3所示,如果该偏差超过了“最大允许误差范围(P2546, Maximum dynamic following error)”,那么系统会报“F07452(A),LR: Following error too high”错误,驱动器的默认响应是OFF1停车。
另外,在驱动器使能状态下,没有执行定位命令时,该功能同样处于激活状态,如果跟随误r2563差大于P2546,系统会报F07452错误。
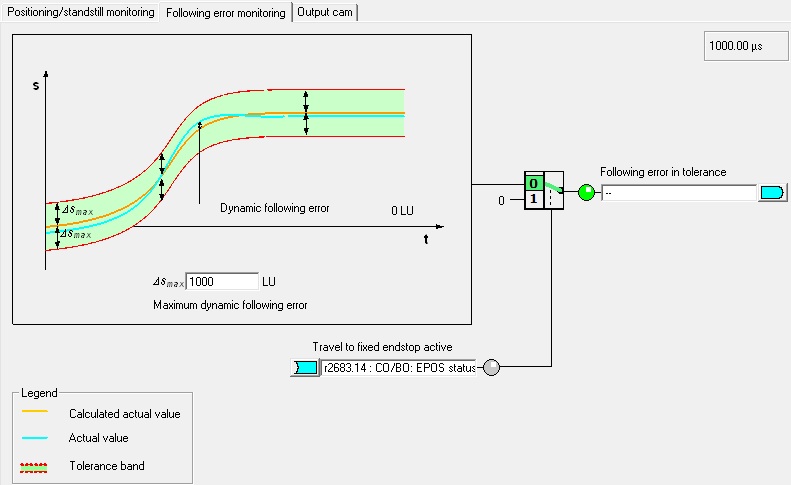
图3 动态跟随误差监视画面
实际应用中,可以根据实际情况调整P2546,以充分发挥动态跟随误差监视的作用。如果最大允许误差P2546设为0,那么跟随误差监视功能被禁用。
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc328260.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫