
n
1模板基本介绍
1.1 模板信息
● FM357-2 包含4个通道,可以控制4个轴;
● 实现独立的单轴定位到多轴插补连续路径控制;
● 控制步进电机和伺服电机,脉冲给定或±10V电压给定;
● 控制旋转轴或线性轴;
● 包含3种固件:L、LX、H;
● 1个CPU最多可以连接3个FM357-2模板;
● 安装位置可以在主机架、中央扩展机架、ET200M分布式IO站中。n
1.2 模板接口描述n
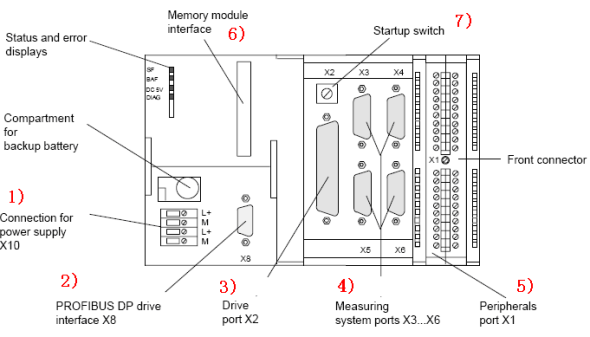

图1 FM357-2接口n
1) X10 电源提供:连接外部DC24电源,给模板提供电源。
2) X8 PROFIBUS DP接口:Sub-D 9针接口用于连接 SIMODRIVE 611-U。
3) X2 驱动接口:Sub-D 50针公接口,用于连接4个轴所对应的驱动器接口。控制伺服的±10V电压输出或控制步进的脉冲输出。
4) X3-X6 测量接口:Sub-D 15针母接口用于连接4个轴所对应的编码器反馈。支持TTL增量型编码器和SSI绝对值编码器。
5) X1 外围接口:FM357-2集成了18个DI和8个DO。需要配置40针前连接器。
6) 储存卡接口:用于插入具有完整固件的储存卡。
7)启动开关:选择开关,特殊操作时有用,如安装固件、备份数据到存储卡等操作。n
2软件和硬件订货号
2.1所需软件订货号:
● STEP7 V5.4 FLOATING LICENSE 6ES7810-4CC08-0YA5
● FM357-2配置软件包 不需要单独订货,随FM357-2产品CD免费提供。如遗失,可以从SIEMENS网站下载,链接 21385102。n
2.2所需硬件订货号:
FM357-2 模板 6ES7 357-4AH01-0AE0
FM357-2 固件
L 固件 6ES7 357-4AH03-3AE0
LX 固件 6ES7 357-4BH03-3AE0
H 固件 6ES7 357-4CH03-3AE0
40针前连接器、驱动连接电缆、编码器连接电缆根据需要选订。n
3固件说明与安装
3.1 固件说明
FM357-2 包含3种固件:L、LX、H。各自的功能不同,用户可以根据具体功能要求选择其中一种固件。固件功能区别见表1。n
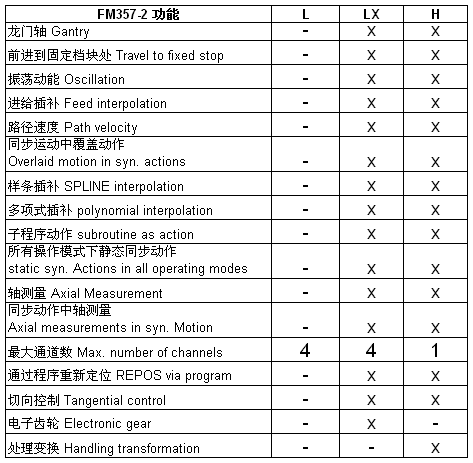
表1 固件L、X和H功能区别n
概括来说,L固件不支持同步、插补等功能,多用于单个轴的独立控制;LX支持同步、插补功能。这两种固件使用较多。H固件使用较少,相对于LX固件,支持手持设备HPU、HT6连接到FM357-2。n
3.2 固件安装步骤
3种固件安装步骤是完全一样的,包含10个步骤:
1) 关闭系统电源,插入包含固件的存储卡到FM357-2存储卡插槽中。CPU开关拔到RUN位置;
2) 设置FM357-2上的启动开关到位置A。
3) 打开系统电源,系统软件和数据从存储卡传送到FM357-2模板。传输过程中,LED状态:SF LED亮,DIAG LED闪烁4次,循环进行。n
错误显示:
如果SF LED以2Hz频率闪烁,固件不能被传送。例如,部分系统软件已经被删除;
如果SF LED亮,DIAG LED快速闪烁3次,然后周期性闪烁3次,固件不能被传送。例如,存储卡上的系统软件已经损坏。n
4) 当DIAG LED闪烁5次,循环进行,并且SF LED已经熄灭,数据传送已经完成。关闭系统电源。
5) 保留存储卡在FM357-2上,不要拔出。
6) 设置FM357-2上的启动开关到位置1。
7) 打开系统电源,等待FM357-2使用缺省值启动,DIAG LED以3Hz速度闪烁,时间大约1分钟。
8) 关闭系统电源。
9) 设置FM357-2上的启动开关到位置0。
10) 打开系统电源,FM357-2使用新的固件启动。
通过上面10个步骤,固件传送完成。需要注意的是,FM357-2正常工作时,存储卡必须插在FM357-2插槽上。FM357-2每次启动时都会检查存储卡中授权与FM中装载的固件版本是否一致。n
4配置软件包的安装
FM357-2 配置软件包可以从SIEMENS网站下载,目前版本是5.03.03。打开下载链接地址会发现,相关的软件有多个(图2)。n
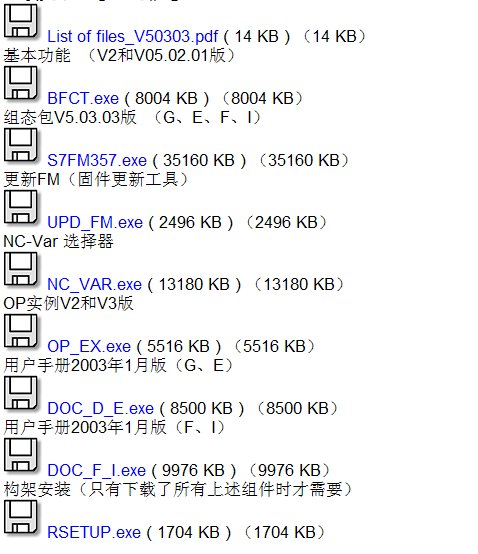
图2 FM357-2配置软件下载n
BFCT.EXE 基本功能块,编写用户程序时需要。必须安装。
S7FM357.EXE 参数化工具,硬件组态,配置FM357-2参数需要。必须安装。
UPD_FM.EXE 模板固件更新工具,升级模板固件时需要。
NC_VAR.EXE NC_VAR变量加载工具。用于加载需要读写的变量到相应DB块中。
OP_EX.EXE 例子程序,建议安装。
DOC_D_E.EXE 用户手册,德文、英文版。
RSETUP.EXE 构架安装工具。n
安装方法:
1) 安装上述组件中的一个
下载相应的EXE文件,首先解压缩,然后点击解压完文件夹中的SETUP.EXE进行安装。
2) 所有组件都安装
下载所用组件(将图2中所见EXE文件下载并解压缩到同一文件夹),然后运行该文件夹下的SETUP.EXE文件,这样就可以出现FM357-2组件安装选择的窗口,此时就可以根据需要选择需要安装的组件(图3)。n
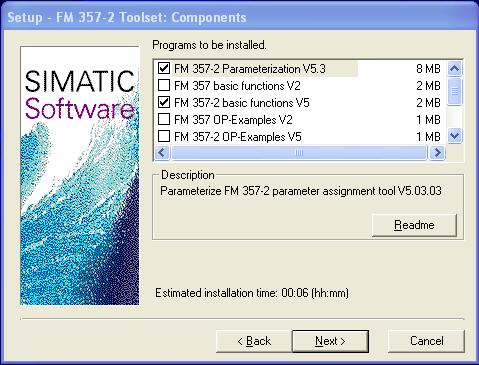
图3 FM357-2组件安装选择n
5 STEP7项目组态和设置
5.1 硬件组态
1)在STEP7新项目中插入新的S7-300站。
2)当开硬件配置窗口,插入机架、CPU等。
3)插入FM357-2模板。之前如果已经安装参数化工具 S7FM357.EXE。就可以在硬件列表找到 “SIMAITC 300”“FM-300”“4-axis motion controls”“FM357-2 4Axiscontrol”(图4)。n
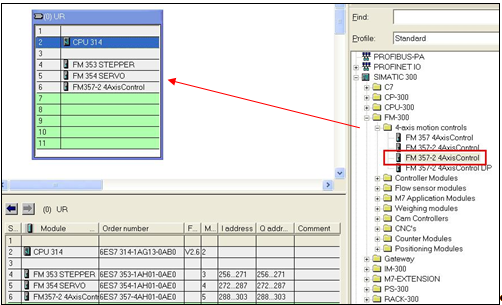
图4 插入FM357-2模板n
4)存盘编译后,下载硬件组态到CPU314。n
5.2 FM357-2模板参数配置n
5.2.1 进入机器数据编辑界面n
1)双击FM357-2模板,打开模板属性对话框,选择Parameterize标签。点击 Parameterize按钮(图5)。n

图5 FM357-2 属性窗口n
2)如果PG与PLC通信连接已经建立,点击Parameterize按钮后,直接进入FM357-2在线窗口(图6)。如果通信连接失败,则系统提示不能建立连接,只能工作在离线模式。n
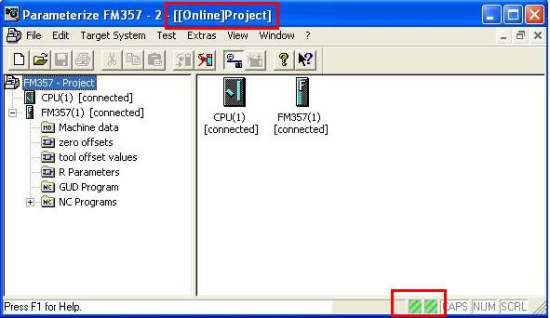
图6 FM357-2参数化在线n
3)进入机器数据编辑界面。选中Machine Data,点击MD Block(图7)。n
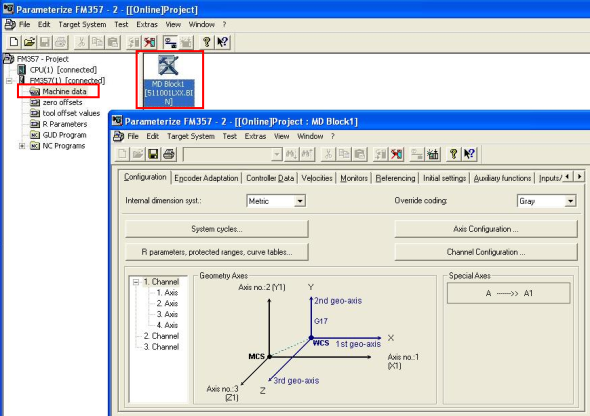
图7 打开MD Blockn
5.2.2 编辑机器数据
注意:MD参数包含很多内容,同FM357-2具体功能有关。MD参数详细描述,请查阅FM357-2模板手册。n
1)轴配置。点击Axis Configuration。以X轴为例,“SM w/o encoder”表示驱动设备是不带编码器的步进电机(图8)。n
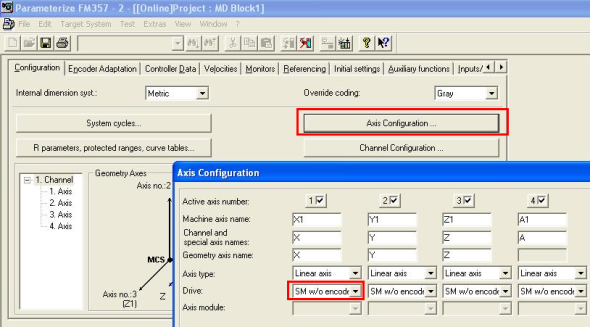
图8 轴参数配置n
2)通道配置。FM357-2可以配置4个通道,这里只使用通道1(图9)。n
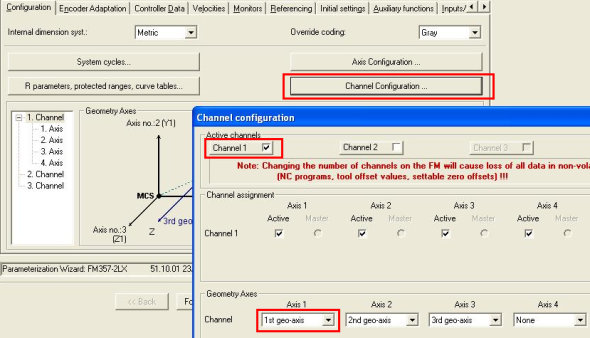
图9 通道参数配置n
3)配置电机转1圈对应的脉冲数、电子齿轮比、工件轴转1圈对应的位移。设置电子齿轮比为1:1,实际表示输出1000脉冲对应10mm位移(图10)。n
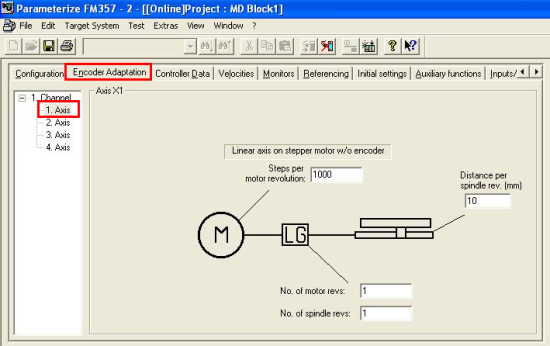
图10 步进电机参数配置n
4)点击Finish,装载并激活MD参数更新,由于是在线编辑,直接更新FM357-2模板中MD参数(图11)。n
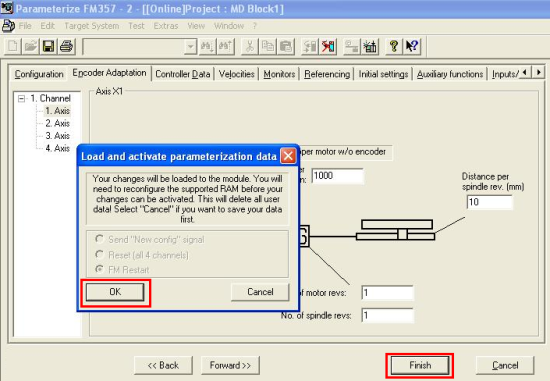
图11 装载并激活MD参数n
5)为了便于以后离线修改和项目备份,可以通过“File”“Save as” 将MD参数保存为文件,文件格式为“.MCP”(图12)。n
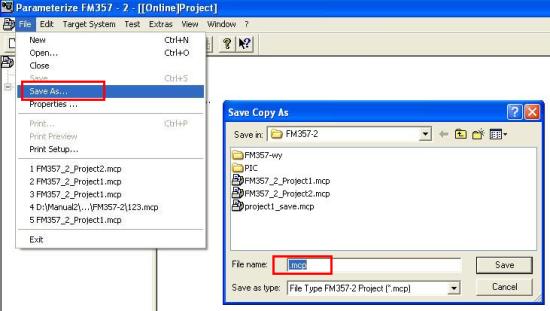
图12 项目备份n
6 编写用户程序
FM357-2 相关的功能块比较多,对于初次使用FM357-2模板的用户,不容易区分和掌握各个功能块的作用和用法。如果自己编写程序,比较费时间且容易出错。这里介绍一种简单的方法:直接拷贝例程中的程序。n
6.1 拷贝修改程序块n
1)在STEP7中打开新项目,选择“Sample Projects”标签,选择并打开项目zEn16_01_FM357-2_BF_EX(图13)。n
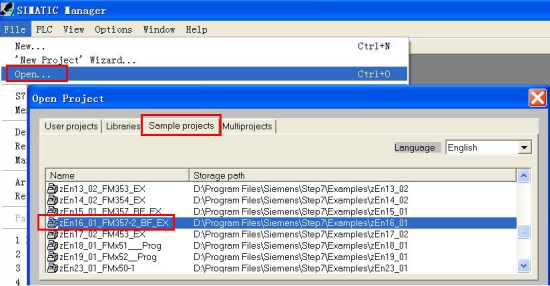
图13 打开FM357-2 Sample Projectn
2)将例程中所用程序块、符号表通过拷贝粘贴到用户自己建的项目中,包括UDT。
3)打开OB100,修改“FMLADDR”变量值。缺省值为256,但实际组态FM357-2模板地址为288-303(图4)。所以需要修改为实际的模板地址(图14)。n
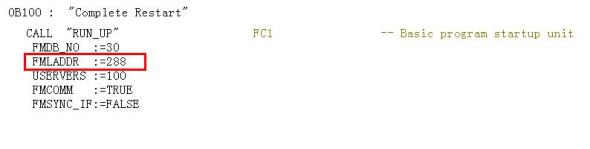
图14 OB100调用FC1n
4)打开OB1,调用FC101(图15)。
说明:例程中包含7个例子Example1-Exapmple7分别对应功能FC100-FC106。但是OB1中并没有对这7个FC都调用,默认只调用FC100(Example1),当用户需要测试别的例子时,需要在OB1中调用相应的FC。因本文档演示点动运行,所以需要调用FC101(Example2 轴点动运行)。关于Example1-Exapmple7实现功能描述,参考手册6.8节。n

图15 OB1调用FC101n
6.2下载所有程序块(图16)。n

图16 下载程序块n
7 调试运行
7.1 CPU运行
将CPU314模式开关拨到“RUN”位置,使CPU运行。如果上述FM357-2固件安装、硬件配置和程序编写都正确,FM357-2将进入运行状态。
FM357-2 正常运行时LED的状态:
● SF 灭
● BAF 灭
● DC5V 亮
● DIAG 3Hz 闪烁n
7.2 通过FM357-2参数化工具调试n
1)重新打开FM357-2在线参数窗口,参见5.2.1。
2)通过菜单命令“Test”“Start-up”,进入Start-up界面。
3)激活X轴点动模式(图17)。n
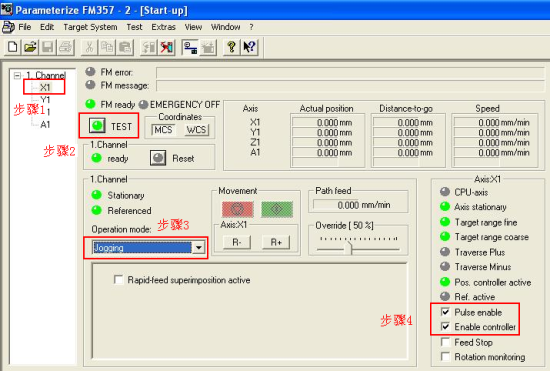
图17 激活点动模式n
步骤1:选中X轴;
步骤2:点击“TEST”按钮,激活测试模式;
步骤3:选择“Jogging”模式;
步骤4:激活“Pulse enable”和“Enable controller”。
4)启动点动操作
点击“R+”正转按钮后,按下键盘空格键。X轴将进入点动模式。通过X轴的“Actual position”和“Speed”显示框,可以监控X轴当前的位置和速度;通过“Traverse Plus”指示灯知道轴当前是正方向运行(图18)。
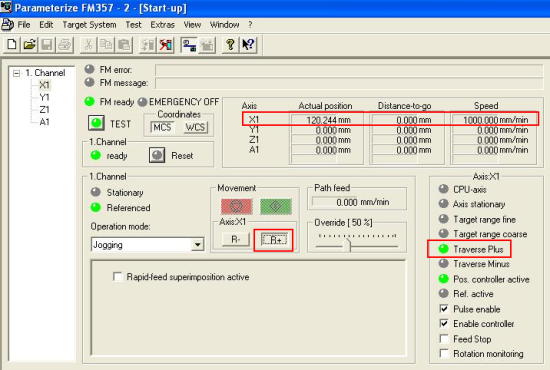
图18 启动点动模式
7.3 通过用户程序调试
说明:FC101来自FM357-2标准例程,这里不对FC101程序代码作详细解释。
1)通过程序控制运行,先要不激活Start-up的测试功能。点击“TEST”确认关闭测试功能。操作完成后“TEST”左侧的指示灯熄灭(图19)。
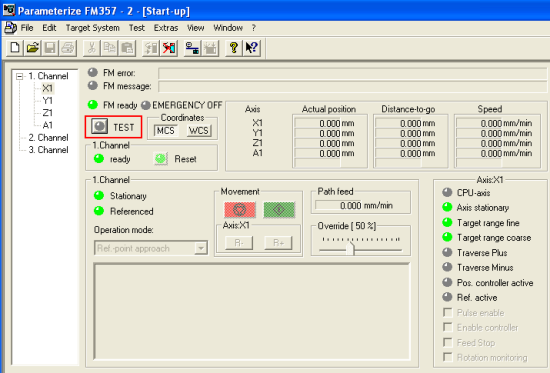
图19 不激活测试功能
2)为了便于监控和调试,建立变量表,并在线(图20)。
控制位:
DB115.DBX0.1=1 控制使能
DB115.DBX0.3=1 正向点动使能
状态位:
DB115.DBX0.5=1 执行没有错误,当前正方向运行
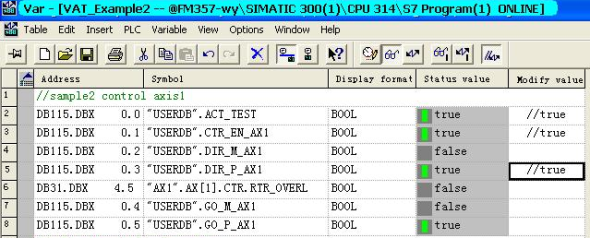
图20 监控变量表
3)同样,进入Start-up可以监控当前位置和速度。只是不能在Start-up中控制轴的运行,因为当前由用户程序控制(图21)。
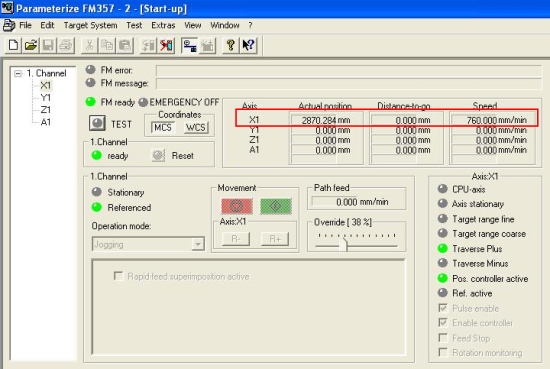
图21 监控位置和速度
8 错误诊断
FM357-2错误类型也很多,并且不是每一种错误都会导致模板SF指示灯亮,通常可以通过Error analysis工具来读取具体的错误原因。
现在通过模拟一个错误来描述错误原因的读取步骤。模拟的错误是将CPU314模式开关拨到“STOP”位置,即停止CPU运行。
1)通过菜单命令“Test”“Start-up”,进入Start-up界面。从图上可以看到FM已经有错误显示 “3000: Emergency stop”(图22)。
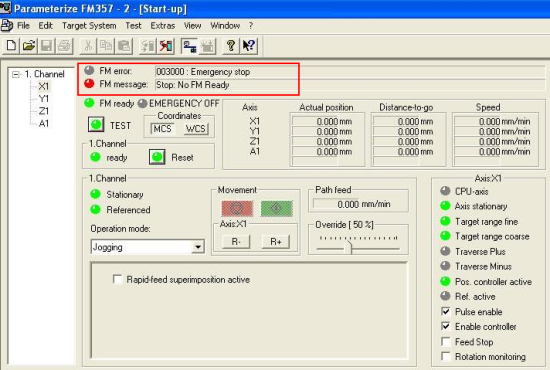
图22 start-up界面
2)通过菜单命令“Test” “Error analysis”,进入Error analysis界面(图23)。从图中可以看到,这里有2个错误。除了“3000: Emergency stop”,还有“2000: Sign-of-life monitoring: CPU not alive”。通过这2个错误描述可以发现与实际模拟错误是一致的。由于CPU没有运行,所以在监控时间内,CPU没有输出确认信号,导致FM357-2急停。
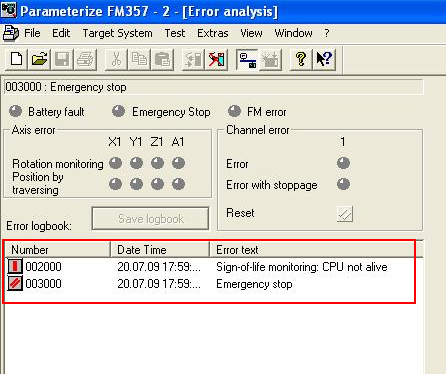
图23 Error analysis
3)查看手册12.3节Error List,可以得到每个错误号的具体描述。
关键词
定位模板,FM357-2,多轴
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc326969.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫