
n
1.串口通讯介绍
CP340/CP34模块是西门子S7-300系列PLC中的串行通讯模块,这些模块具有1个串行通讯口(RS232C或TTY或RS485/422)。可以使用这种通讯模块实现S7-300与其他串行通讯设备的数据交换。同样,将PLC功能和运动控制器结合起来的SIMOTION也可以支持CP340和CP341
对于SIMTOIN C,CP340/341可以直接通过背板总线相连。对于SIMOTION P和SIMOTION D,可以带ET200M作为其远程IO,而ET200M上可以带CP340和CP341,因而也可以通过CP340和CP341进行串行通讯。
与s7-300相比较,SIMOTION目前还不支持“MODBUS”和“DATA HIGHWAY”通讯,其它功能和PLC类似。
软件版本要求:
SIMOTION SCOUT V4.0或更高
SIMOTION Kernel V4.0或更高
SIMOTION technology packages V4.0 或更高
本文将以SIMOTION和S7-300之间利用CP341进行通讯为例,介绍SIMOTION中如何实现Point-to-Point通讯。n
2.PLC侧组态和设置
2.1参数化CP341模板:
新建STEP 7项目,在硬件组态窗口中插入CPU和CP341模块,双击CP341模板,打开CP341模板的属性窗口:n
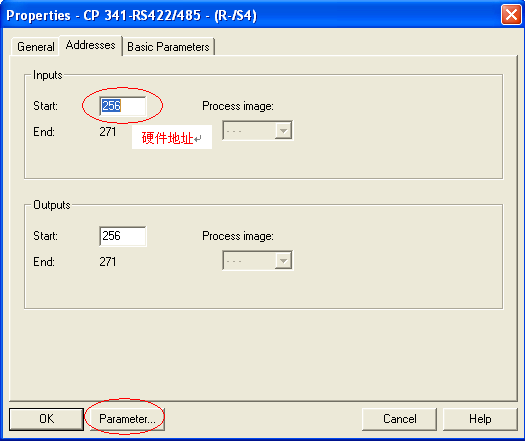
图1 CP341模块属性窗口n
点击属性窗口上的Parameters按钮:n
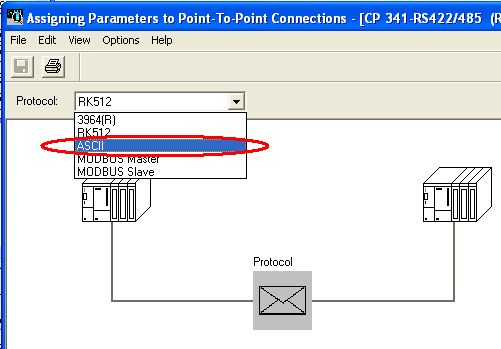
图2 协议选择n
选择ASCII协议,双击信封图标:n
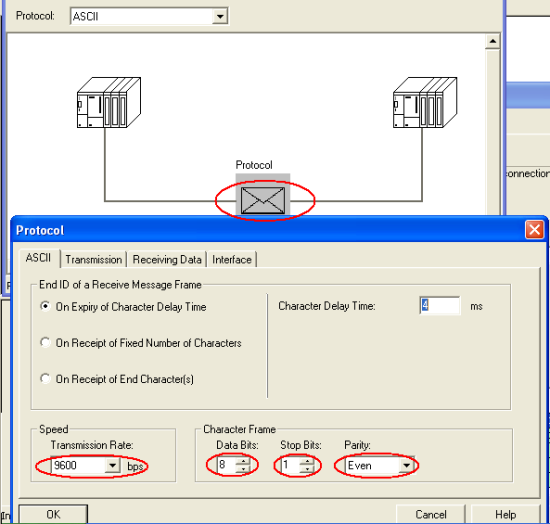
图3 协议参数设置n
弹出ASCII协议通讯参数设置窗口,保持默认值:9600 bit/s, 8 data bits, 1 stop bit, even parity。对硬件组态存盘编译,下载硬件组态。n
2.2 编写通讯程序:
在安装完串口通讯的驱动程序后,可在PLC程序库中找到用于串口通讯的程序:n
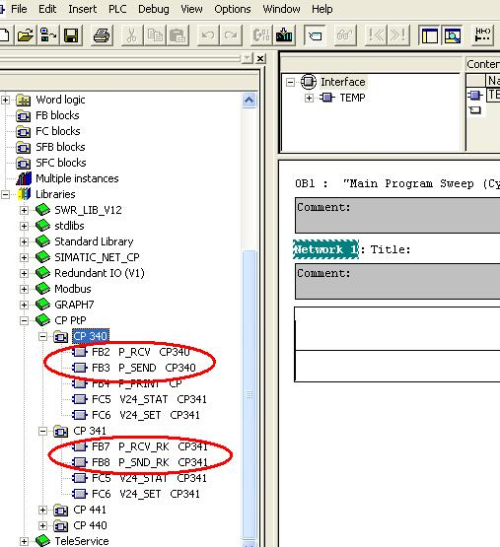
图4 串口通讯程序块n
在OB1调用FB7实现字符收发功能:n
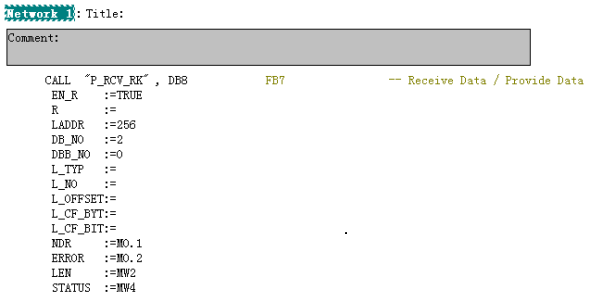
EN_R为TRUE时始能接收
在OB35中调用FB8实现字符发送功能n
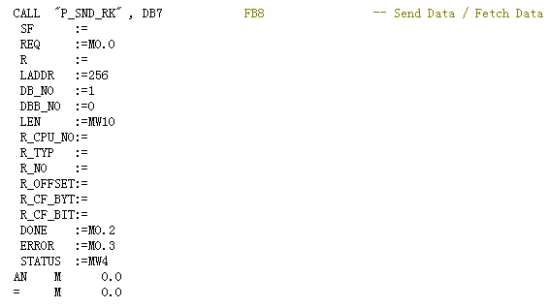
其中REQ需要正跳沿来触发通讯。n
3.SIMOTION侧组态与编程
3.1 硬件组态
在SIMOTION打开所建立的STEP 7项目,插入D435,建立一个DP网络,并在网络中添加一个ET200M站,并在ET200M站中插入CP341n
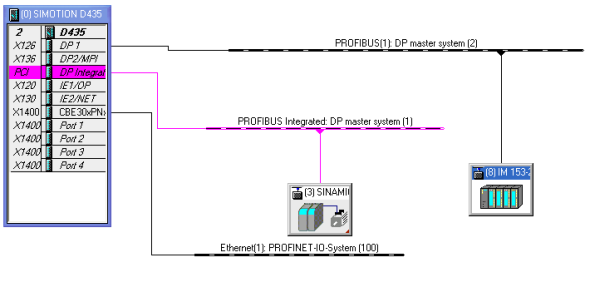
图5 SIMOTION侧硬件组态n
然后对CP341进行参数化,过程和PLC中完全相同。n
3.2 软件编程
3.2.1程序块介绍
SIMOTION中的串行通讯程序是集成在标准库里的,无需安装相应的驱动,如下:n
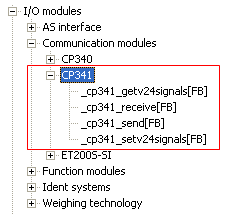
图6 SIMOTION串口通讯程序块n
_CP341_send用于数据的发送。
_CP341_send的参数含义如表1所示。n
表1 _CP341_send功能块参数含义n
| 参数名 | 输入 | 数据类型 | 含义 |
| 输出 | |||
| execute | IN | BOOL | 触发发送,上升沿有效 |
| reset | IN | BOOL | 为True时表示取消当前发送 |
| moduleAddress | IN | DINT | 模块地址 |
| dataOffset | IN | UDINT | 第一字节的位置偏差 |
| dataLength | IN | UDINT | 发送的数据长度 |
| periIn | IN | ARRAY [0..15] | 用于CP卡IO输入的背景数据块 |
| of BYTE | |||
| periOut | IN/OUT | ARRAY [0..15] | |
| of BYTE | 用于CP卡IO输出的背景数据块 | ||
| data | IN/OUT | ARRAY [0.0.1023] | 发送的数据区 |
| of BYTE | |||
| done | OUT | BOOL | 完成标志位 |
| error | OUT | BOOL | 错误标志位 |
| errorID | OUT | WORD | 故障详细信息,如果error=TRUE, |
| 那么errorID 中将显示事件等级和故障号 | |||
| errorIdTransfer | OUT | DINT | 数据传送给CP卡时产生故障(如果errorID中显示16#1E0F时,那么errorIdTransfer中会有更详细的诊断信息 |
| startup | OUT | BOOL | CP启动完成标志位,为False标志启动完成 |
_CP341_receive用于数据的接收,其参数含义表2所示n
表2 _CP341_received功能块参数含义n
| 参数名 | 输入 | 数据类型 | 含义 |
| 输出 | |||
| enable | IN | BOOL | 接收使能 |
| reset | IN | BOOL | 取消接收 |
| moduleAddress | IN | DINT | 模块地址 |
| dataOffset | IN | UDINT | 第一字节的位置偏差 |
| periIn | IN | ARRAY[0..15] | 用于CP卡IO输入的背景数据块 |
| of BYTE | |||
| periOut | IN/OUT | ARRAY[0..15] | |
| of BYTE | 用于CP卡IO输出的背景数据块 | ||
| dataCl3964 | IN/OUT | ARRAY[0.0.1023] | 接收数据区 |
| of BYTE | |||
| dataCl512 | IN/OUT | ARRAY[0..6] of | RK 512 的数据区 |
| Struct_CP341 | |||
| _Cl512Data | |||
| comFlags | IN/OUT | ARRAY [0 to 31] | RK 512通讯标志 |
| of BYTE | |||
| ewDataReceived | OUT | BOOL | 新数据接收标志位 |
| error | OUT | BOOL | 错误标志位 |
| dataLength | OUT | UDINT | 接收长度 |
| errorID | OUT | WORD | 故障详情,如果error=TRUE, |
| 那么errorID 中将显示 事件等级和故障 | |||
| errorIdTransfer | OUT | DINT | 数据传送给CP卡时产生故障(如果errorID中 |
| 显示16#1E0F时,那么时会有更详细的诊断信息 | |||
| startup | OUT | BOOL | CP启动状态标志位 |
_CP341_send和_CP341_receive必须在BackgroundTask或TimerInterruptTask中循环调用,如果不循环调用发送请求或接收请求无法执行。不能在SystemInterruptTask中调用,也不推荐在IPOSynchronousTask等同步任务中调用。_CP341_send和_CP341_receive必须在CP卡初始化完成以后进行。n
3.2.2 SIMOTION编程
首先需要建立两个数组型的IO变量,对应CP的相应地址,为16个字输入,16个字输出:n

图7 IO变量定义n
然后插入1个ST程序单元E_CP341n
在Unit单元的Interface中定义如下的全局变量:n
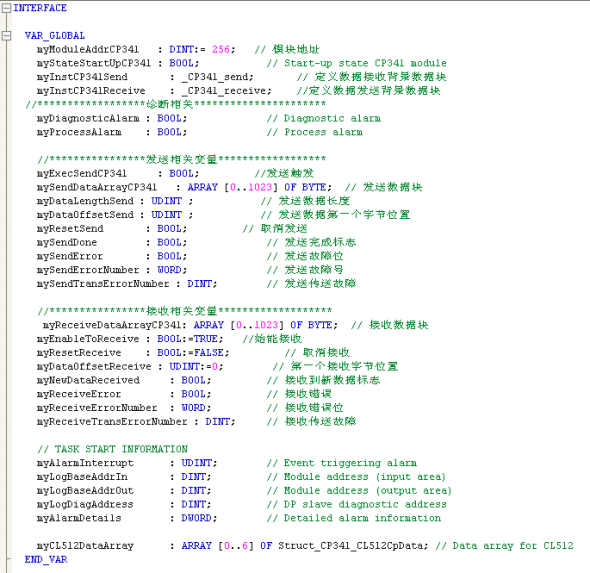
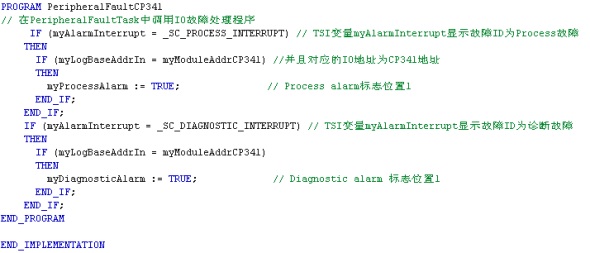
同时定义三个程序:初始化程序,主程序和故障处理程序:n

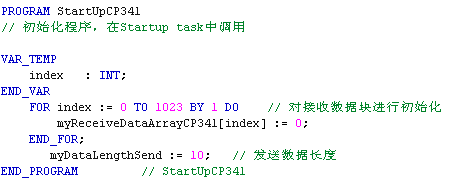
在StartUpCP341对接收数据区清零,定义发送长度:
主程序包括发送程序和接收程序以及故障诊断程序:
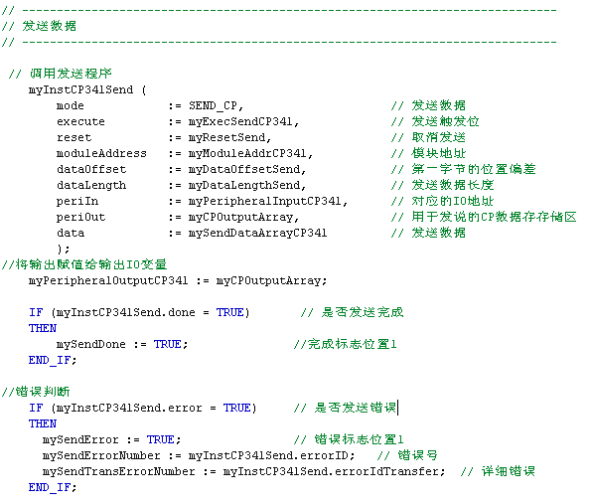
发送程序如下:
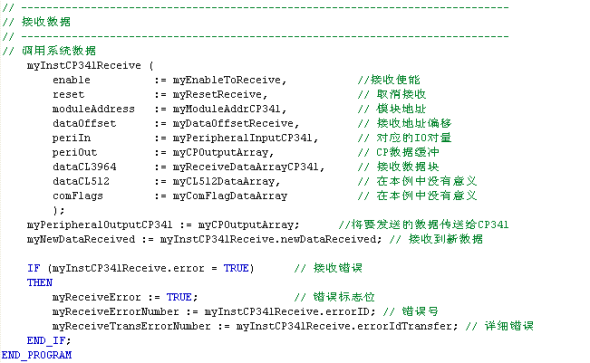
接收程序如下:
故障诊断程序如下:
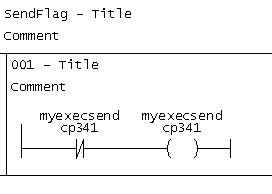
由于发送需要上升沿,可编写如下程序,并在时间中断中周期性调用以产生正跳沿:
3.3 程序结构
程序结构如下,在StartupTask中调用初始化程序,在背景任务中调用主程序,在时间中断程序中调用发送标志位,在外设故障任务中调用故障处理程序:
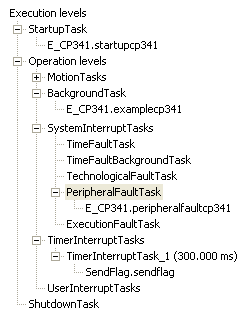
图7 SIMOTION程序结构
4 实际通讯数据监控
PLC中数据监控
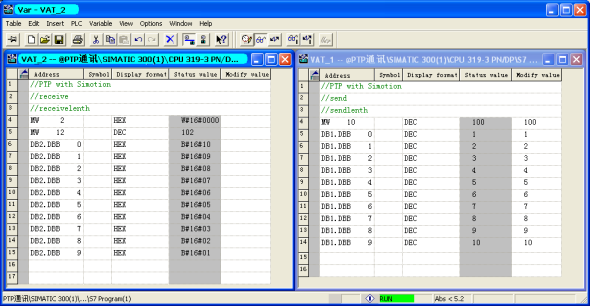
图7 PLC侧数据监控
在SIMOTION中建立相应的变量表来进行数据监控:
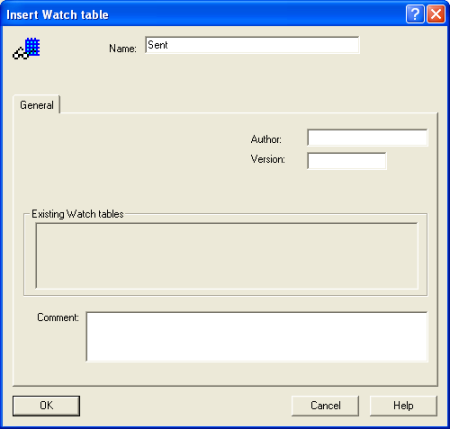
图8 SIMOTION建立变量表
分别建立发送和接收的监控表,然后将相应的全局变量加到变量表中,如下图:
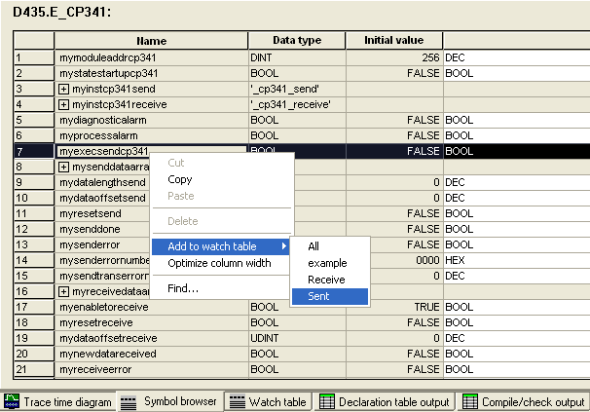
图9 SIMOTION在变量表中添加变量
SIMOTION接收数据监控:
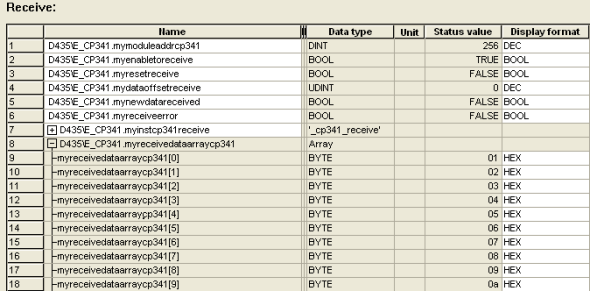
图10 SIMOTION接收数据监控
SIMOTION 发送程序监控:
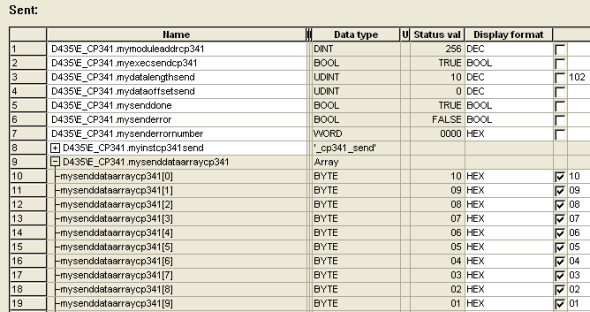
图11 SIMOTION发送数据监控
对接收到数据进行Trace:
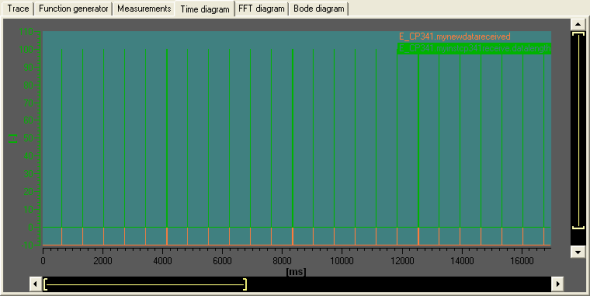
图12 接收数据Trace记录
可以看接收数据长度的值和接收数据标志位只保持一个Cycle即被复位。
5.程序参考实例
示例程序请参考附带文件:PTP.zip ( 920 KB )
6.参考文献
Supplement to CP 340 and CP 341Modules Function Manual 27035103
关键词
SIMOTION,串口通讯,CP340,CP341
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc326758.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫