
n
在SIMATIC PCS 7系统的功能基础上进行了扩展的CEMAT系统可以满足水泥行业的任何需求。CEMAT保留了SIMATIC PCS 7的全部特性与功能,并新增了一些设备运行和故障诊断方面的管理功能。此外,CEMAT还设计有部分特殊功能模块和面板,针对水泥厂常用的各类运行、联锁和监督功能进行管理。在V8.0版本中还涵盖了矿产自动化标准MINERALS AUTOMATION STANDARD (MinAS) V8.0,该标准专门用于满足采矿业方面的需求,具有典型PCS7高级过程库(Advanced Process Library,APL)的外观和感觉,还有许多新增功能,例如:电源管理、组/驱动系统全局通信、在线曲线选择功能等。n
CEMAT的安装和配置参考文档:n
| CEMAT V8.0使用入门-安装和配置 88894949 |
1. 功能块基础
CEMATV 8.0中单向驱动器C_DRV_1D可以控制、监视驱动器的运行,适用于所有的单向驱动器,主要用于单向电机和传送带的控制。采矿行业标准001中可以设定Feature和OS_Perm管脚,满足不同的控制需求。C_DRV_1D功能块可以监视反馈、接触器输出、电气备妥、过载等连锁信号。可以在本地模式、手动模式、自动模式下对驱动器进行启停操作,同时能通过操作员面板实现设定值输出和监控、模拟量监控等功能。
从项目的主数据库中调用该功能块,如下图所示:n
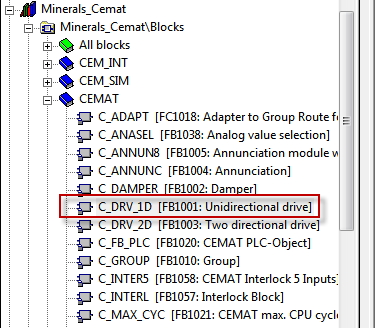
图 1-1 C_DRV_1D功能块调用n
1-1 功能块IO说明
功能块的主要IO管脚如下图所示:n

图 1-2 C_DRV_1D主要IO管脚说明n
常用管脚的功能描述如下表所示:n
表 1-1 功能块常用管脚说明n
| 功能块管脚 | 描述 | 应用 |
| FbkRun | 运行反馈 | 电机运行信号返回 |
| ElAvail | 电气备妥 | 现场电气准备好 |
| Overload | 过载 | 监视电机的过载,用于热继电器保护 |
| IntStart | 启动互锁 | 用于设备之间的连锁,适用于启动阶段 |
| IntOper | 操作互锁 | 用于设备之间的连锁,适用于启动和运行阶段 |
| IntProtG | 保护信号 | 相关设备的连锁, |
| ProFB | 过程反馈 | 系统相关的监控, |
| StartAut | 自动启动 | 通过C_Group功能块启动驱动器 |
| StartLoc | 本地启动 | 通过现场操作按钮启动驱动器 |
| GR_LINK1 | 运行组互联 | 连接到C_Group功能块,将DRV_1D划分到工艺组 |
| RunSig | 设备运行 | 用于运行组状态返回,及运行组顺序启动连锁 |
| ContOn | 命令输出 | 连接现场主令开关,控制电机启停 |
1.2 功能块控制模式
可以通过程序、面板、现场按钮控制驱动器,对应C_DRV_1D驱动块的三种的控制模式:n
• 自动模式:通过IO互联控制设备,主要用于组执行启动/停止操作。由控制室中的操作员通过组面板执行启动/停止命令。在组启动时,在经过启动警告时间之后,所有相关连的驱动器将根据联锁条件顺序启动;组停止时,所有相关连的驱动器将根据联锁条件顺序停止。也可通过程序(通过过程条件)启动/停止驱动器。
• 手动模式:通过驱动块的面板控制设备的启停,可单独启动/停止单个驱动器,也称为单机模式。在手动模式模式下启动设备,驱动器模块本身将生成启动警告。在经过启动警告时间之后,才发出启动命令。手动模式根据互锁条件的不同可以分为以下的四种方式:
表 1-2 手动模式的四种方式n
| 名称 | 描述 |
| Manual interlocked mode | 所有的保护和互锁都有效 |
| Manual mode with reduced interlocks | IntPortG、IntPortA、IntStaE、IntOpE有效 |
| Manual mode only protection interlocks | IntPortG和IntPortA有效 |
| Manual mode non-interlocked | 只有IntPortG有效 |
• 就地模式:使用就地开关启动/停止设备,就地开关信号需要连接至 PLC。就地模式允许通过就地安装的按钮来启动和停止驱动器。主要用于维护操作,就地模式为非联锁模式,这就意味着驱动器的启动和运行条件无效。
除三种控制模式之外,C_DRV_1D功能块还提供一种维修模式OoS(out of service)。在OoS模式下功能块的所有控制输出都为0,同时所有的消息都被抑制,仅仅通过功能块的状态字显示功能块处于OoS模式。n
三种控制模式可以通过操作员面板切换,也能通过功能块的IO管脚AutModOn、ManModOn 、LocModOn进行切换,IO管脚主要用于通过组功能块切换驱动块的操作模式。输出管脚AutoAct、ManuAct、LocalAct、OoSAct显示驱动块的操作模式。面板上切换和IO管脚切换同时有效,都是信号的上升沿有效,即最后执行的命令决定着功能块的模式。在模式切换过程中需要注意以下几点:n
• 只能通过面板切换的方式离开OoS模式;在OosModOn=0时,功能块会立即进入OoS模式;
• 必须连接驱动块C_DRV_1D.GR_LINK管脚到组功能块Group.G_LINK管脚,否则功能块显示error_num=3,在面板上无法离开OOS模式;
• 默认Feature.bit8=0,在AutModLo=0,会提示fault,此时能够进行操作模式切换,但是无法对驱动器进行启停操作;
• 默认Feature.bit19=1,StartAut从01会将驱动块从本地和手动切换到自动模式并启动驱动器;
• 在设备运行时无法切换到本地模式;
• 当驱动块和Group功能块之间通过GR_LINK 连接时,featurebit.25=1可以将Group功能块的模式传递到驱动块上,此时不再需要连接xxxModOn管脚;
操作模式的切换受功能块管脚Feature和OS_perm限制,可以根据现场的控制需求设定控制位。与操作模式相关的featurebit 和 OS_perm如下表格所示:n
表 1-3 与操作模式相关的OS_Permn
| OS_Perm | 功能描述 | 默认值 |
| 0 | 1=允许操作员切换到本地模式 | True |
| 1 | 1=允许操作员切换到手动模式-Interlocks | True |
| 2 | 1=允许操作员切换到自动模式 | True |
| 3 | 1=允许操作员切换到OoS模式 | False |
| 5 | 1=允许操作员切换到手动模式-non Interlock | False |
| 6 | 1=允许操作员切换到手动模式-reduce Interlock | False |
| 7 | 1=允许操作员切换到手动模式-only Protection Interlock | False |
表 1-4与操作模式相关的Featuren
| Featurebit | 功能描述 | 默认值 |
| 0 | 允许退出本地模式 | True |
| 13 | 允许退出手动模式 | True |
| 16 | 手动模式-non interlocked | False |
| 17 | 手动模式-only protection interlocks | False |
| 18 | 手动模式-reduced interlocks | False |
| 20 | 允许退出Oos模式 | True |
| 21 | 允许退出自动模式 | True |
| 23 | 使能模式切换 | True |
|
通过IO管脚切换DRV_1D的模式 | ||
| 1 | 使能“本地启动”接口 | True |
| 2 | 使能“本地停止”接口 | True |
| 14 | 使能“自动启动”接口 | True |
| 15 | 使能“自动停止”接口 | True |
| 25 | 使能通过Group块切换驱动块模式 | True |
| 19 | 通过“StartAut”切换驱动块到自动模式 | True |
在将上述Feature和OS_Perm管脚的控制位都设置为true之后,在功能块的面板上可以进行所有模式的切换,如下图所示:n
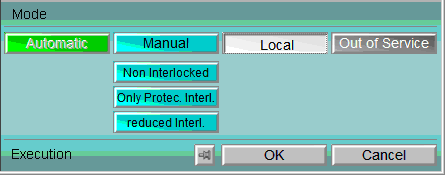
图 1-3 在面板上切换C_DRV_1D块操作模式n
1.3 功能块互锁
在使用中需要考虑驱动器的保护信号,以及在工艺条件不满足时通过连锁信号停止驱动器。C_DRV_1D功能块提供三种类型的互锁信号:
• 启动互锁(IntStart、IntstaE):驱动块的启动信号。仅在启动过程有效,即在两个管脚都=1时允许启动设备;在运行过程中丢失该信号,不会导致设备停止。用于设备之间的连锁,例如:只能在风扇挡板关闭之后才能启动风机,此时需要将Damper.Pos管脚连接至DRV_1D.IntStart;
• 操作互锁(IntOper 、IntOpE):驱动块的操作互锁。在启动过程和运作中都有效,=1时允许启动设备,=0时会停止设备(不会产生报警)。典型应用是在物料传送过程中前后工序之间的连锁,例如:下游工艺设备运行之后才允许启动上游工艺设备,当下游设备停止后必须立即停止上游设备,此时需要将下游功能块的RunSig连接至上游功能块的IntOper管脚;
• 保护信号(IntProtG、IntProtA);驱动块的保护互锁。在启动过程和运行中都有效。=1时允许启动设备,=0时会停止设备,同时会在面板上提示错误。
功能块的互锁在操作模式下略有不同。特别是在四种不同的手动模式下,部分互锁是无效的。在操作模式与互锁之间的关系如下表所示(X表示有效):n
表 1-5操作模式与互锁之间的关系n
| Operating mode | IntStart | IntStaE | IntOper | IntOpE | IntProtA | IntProtG |
| Automatic | X | X | X | X | X | X |
| Manual interlocked mode | X | X | X | X | X | X |
| Manual mode with reduced interlocks | X | X | X | X | ||
| Manual mode only protection interlocks | X | X | ||||
| Manual mode non-interlocked | X | |||||
| Local mode | X | X | X |
当C_DRV_1D功能块的互锁管脚连接至其他功能块(例如APL功能库Interlock块)时,在面板上会显示对应的符号,同时鼠标点击该符号可以跳转到对应的面板上。功能块互锁如下图所示:n
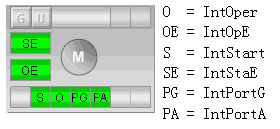
图 1-4 C_DRV_1D块的互锁n
1.4 DEMO的软硬件及测试环境n
• 计算机操作系统Windows 7 Ultimate 64位英文版
• PCS 7 V8.0 update1 英文版
• CEMAT V8.0,MinAs
• CPU 417-4XL04 + CP443-1
2. 功能块的基本控制
2.1 功能块连接
C_DRV_1D用于控制单向电机,结合C_Group功能块在自动模式下可以通过组功能块的面板启停C_DRV_1D。组功能块和C_DRV_1D之间的连接如下图。图示为仿真程序,所以将输出ContOn连接至信号返回FbkRun上,实际使用时需要连接至现场信号。n
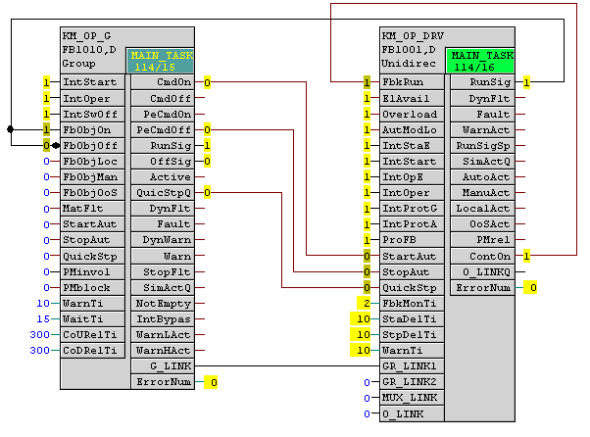
图 2-1 C_DRV_1D与C_Group功能块连接n
设置C_DRV_1D的块图标为23,如下图所示;n
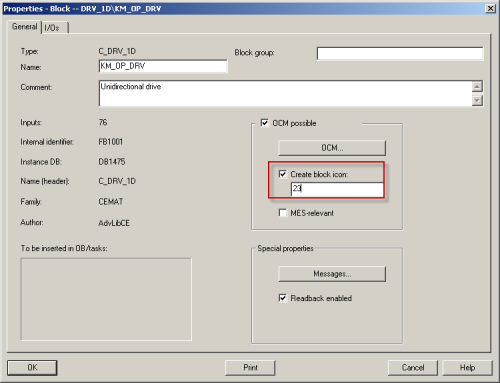
图 2-2 设置C_DRV_1D块图标n
进行OS编译之后会生成对应的块图标,在点击块图标时弹出对应的功能块的标准面板,如下图所示;n
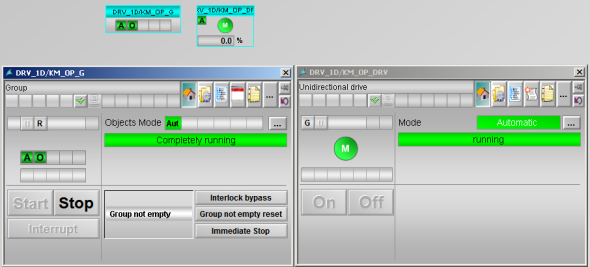
图 2-3 C_DRV_1D与C_Group块图标和标准面板n
2.2 块图标和面板
在CEMAT V8.0功能库中C_DRV_1D功能块有14种类型的块图标,如下图所示:n
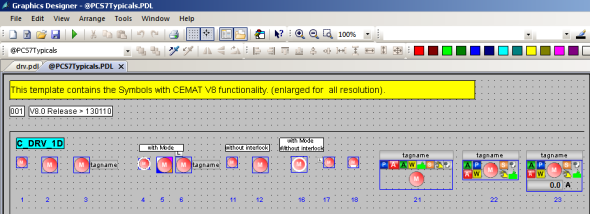
图 2-4 C_DRV_1D块图标n
对于块图标中各个符号的含义如下所示:n
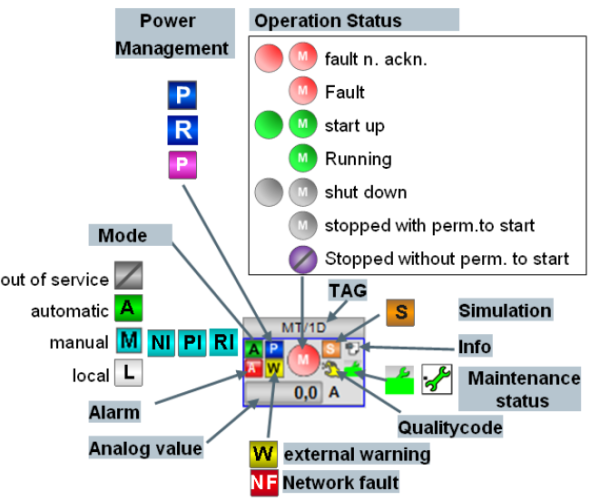
图 2-5 C_DRV_1D块图标符号含义n
C_DRV_1D的标准面板如下图所示。在标准面板上能够完成驱动器的启停、模式切换、设定值输出等操作;同时还可以监控驱动器的互锁、系统反馈以及设定值返回值、模拟量监控值。n
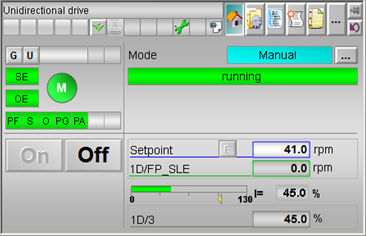
图 2-6 C_DRV_1D标准面板n
在C_DRV_1D诊断面板上可以查看功能块的诊断数据,包括interface word、process parameter、output interface、alarm、paramter field等内容,如下图所示;通过这个面板就可以了解功能块主要的IO状态。n
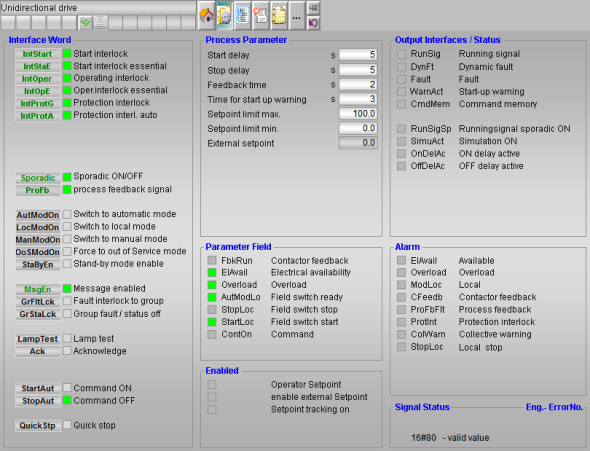
图 2-7 C_DRV_1D诊断面板n
2.3 驱动块操作
C_DRV_1D功能块与控制相关的几个时间含义如下,OS_Perm=31时允许操作员在面板上修改的这几个时间。n
• FbkMonTi :运行反馈时间监测。在功能块发出启动命令之后,功能块会监测运行反馈,在设定的时间未检测到运行反馈,功能块会报错。自动模式和手动模式都适用。
• StaDelTi :自动模式下的启动延时。在自动模式下,发出启动命令后,功能块会在延迟时间后才输出启动命令。
• StpDelTi :自动模式下的停止延时。在自动模式下,发出停止命令后,功能块会在延迟时间后才输出停止命令。
• WarnTi :手动模式下的启动延时。在手动模式下发出启动命令后,功能块会在延迟时间之后才输出启动命令,用于声光报警。
2.3.1、自动控制模式
在自动模式下通过管脚StartAut启动驱动器。StartAut从01时开始启动延时计时,面板上显示“start delay“。在延时计时结束后ContOn=1启动设备并开始反馈监控计时,面板上显示”feedback time“。如下图所示:n
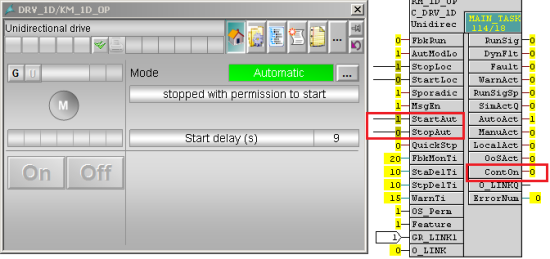
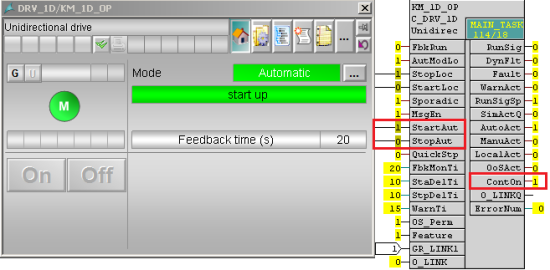
图 2-8 自动模式下启动驱动器n
如果在设定的反馈监控时间内没有检测到FbkRun=1,则在面板上会提示反馈错误,如下图所示。此时必须确认故障之后才能再次启动驱动器。n
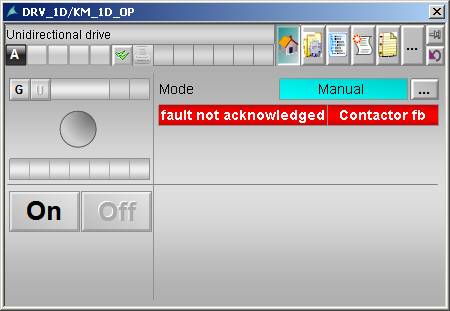
图 2-9 反馈错误n
在自动模式下通过管脚StopAut停止驱动器,StopAut从01时开始延时计时,如下图所示。延时计时结束后立即停止设备。如果控制输出ContOn和反馈FbkRun不匹配,则提示图 2 9所示的错误。n
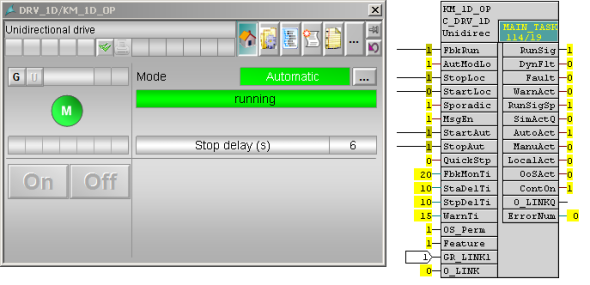
图 2-10 自动模式停止驱动器n
2.3.2、手动模式
在手动模式下操作员可以通过功能块面板启停设备。在面板上按下“On”按钮后开始启动延时,面板提示“Start up warning“。延时时间WarnTi结束后ContOn=1启动设备并开始反馈监控计时,面板显示”feedback time“。手动模式启动如下图所示。n
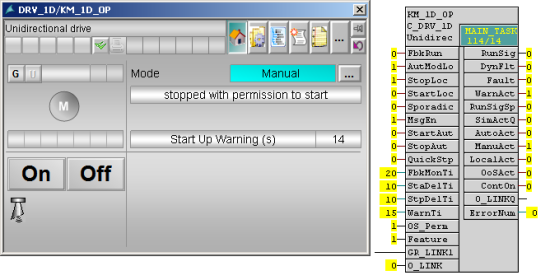
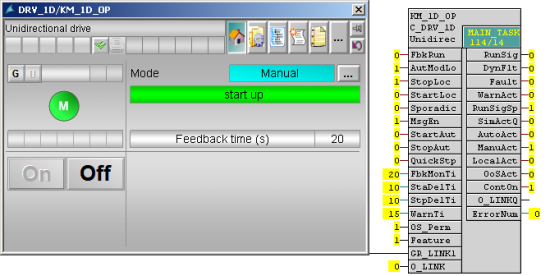
图 2-11手动模式下操作设备n
手动模式下通过面板“Off”按钮立即停止驱动器。如果控制输出ContOn和反馈FbkRun不匹配,则提示图 2 9所示的错误n
2.3.3、本地模式
在本地模式下通过管脚StartLoc=1启动设备,通过管脚StopLoc=0停止设备。本地模式下没有时间监控,输出和反馈不匹配时也不会提示错误,如下图所示:n
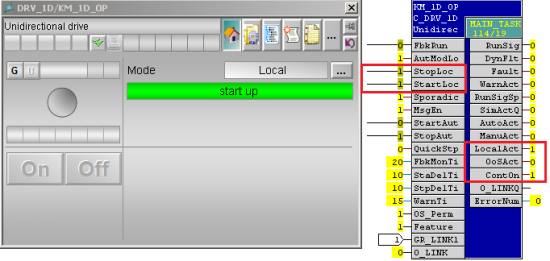
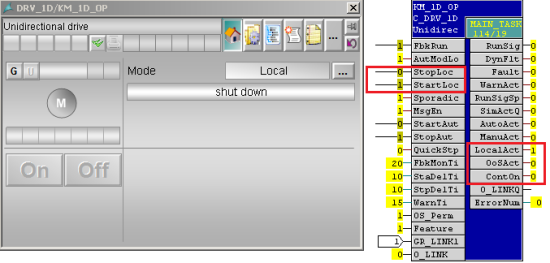
图 2-12 本地模式下操作设备n
在默认Feature设置下手动模式和自动模式下还会检测StopLoc的状态,当StopLoc=0时在面板上会提示fault =“Local stop”,如下图所示:n
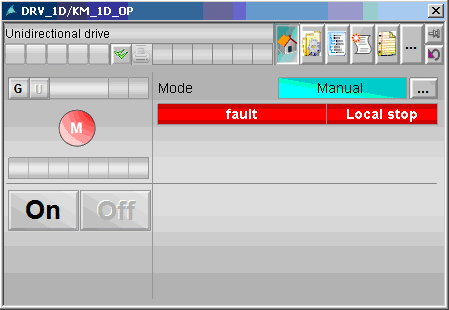
图 2-13 手动模式下操作设备n
与本地模式相关的Feature如下表所示:n
表 2-1与本地模式相关的Featuren
| Featurebit | 功能描述 | 默认值 |
| 3 | 本地启动Startloc始终有效(自动模式和手动模式) | FALSE |
| 4 | 本地停止StopLoc在手动模式和自动模式下有效 | TRUE |
| 5 | 本地启动仅在inching | FALSE |
| 6 | 本地模式下启动报警 | FALSE |
| 7 | 从本地模式切换到手动模式和自动模式时不停止驱动器 | TRUE |
| 8 | "AutModLo" 作为位置开关 | FALSE |
3. 其他功能
C_DRV_1D功能块除了基本的设备启动停止控制功能外,还可以完成系统反馈监控、模拟量监控功能,同时驱动块还能够实现模拟量输出和反馈监控。
3.1 设定值
C_DRV_1D功能块通过管脚SP_OUT对外部输出设定值,要求设置featurebit.29=1,并通过PV管脚监控返回值。
设定值的数值来源有两种方式:面板操作员输入和IO管脚互联,由SP_ExEn控制。当SP_ExEn=1时SP_OUT取自SP_Ex,SP_ExEn =0时SP_OUT来自面板输入。相关的IO管脚SP_TrkPV=1时使能设定值跟踪,SP_HiLim和SP_LoLim用于限定设定值的高低限值。
功能块C_DRV_1D与设定值相关的IO管脚和面板显示如下图所示(示例中SP_ExEn=1,SP_OUT=SP_Ex):
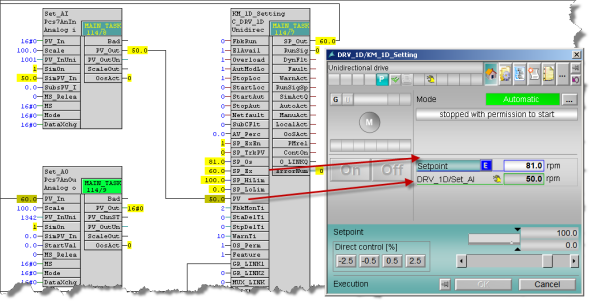
图 3-1 C_DRV_1D设定值
3.2 系统状态反馈
功能块C_PROFB可以监控系统反馈,只能配合C_DRV功能块使用。在C_PROFB中可以设定启动反馈时间和停止反馈时间。在C_DRV功能块启动之后,C_PROFB开始启动计时,如果在设定时间内未检测到反馈输入InSig=1,则输出ProFB=0同时功能块产生报警;同样在C_DRV功能块停止之后开始停止计时,在设定时间内如果未检测到反馈InSig=0,则将输出ProFB=0并产生报警。在驱动块处理停止状态时也会监控过程反馈,ContOn与ProFb不一致时会产生报警。
同时C_PROFB还可以监控模拟量过程的反馈信号,例如速度监控和压力监信号,要求返回值PV在设定时间内达到设定值StUpLim/ShDoLim。
C_DRV_1D功能块可以借助C_PROFB实现对系统反馈信号的监控,功能块之间的互联和面板显示如下图所示,在C_DRV_1D的面板上点击PF会跳转到C_PROFB面板。
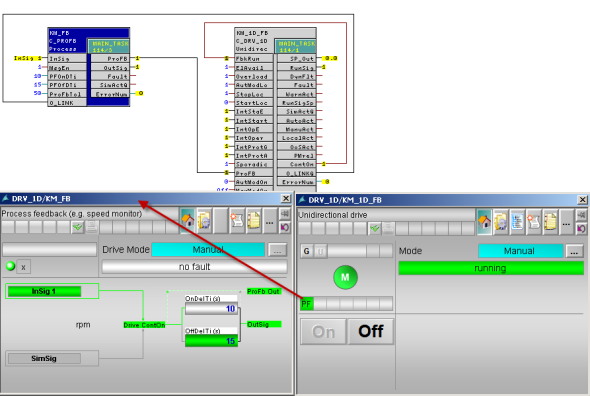
图 3-2 C_DRV_1D的系统反馈
3.3 模拟量监控
功能块C_Measure用于读取和监视模拟量信号,可以实现8个设定值的监控,超过设定值会产生报警信息。C_Measure功能块可以做直接读取卡件的数值,也能读取经过Pcs7AnIn处理后结构变量。C_MEASURE功能块通过xx_Lim管脚设定限值,通过PV_xx_En=1使能限值报警。
C_Measure功能块能以测量值和百分比两种方式显示模拟量,百分比指输入值PV占高限报警H_Lim的比值。在C_DRV_1D面板上点击测量值时会跳转到C_Measure面板。
C_DRV_1D功能块可以借助C_Measure实现对模拟量信号的监控,并且可以通过C_Measure的报警实现互锁控制。C_Measure与C_DRV_1D及PCS7AnIn功能块之间的连接及面板显示如下图:
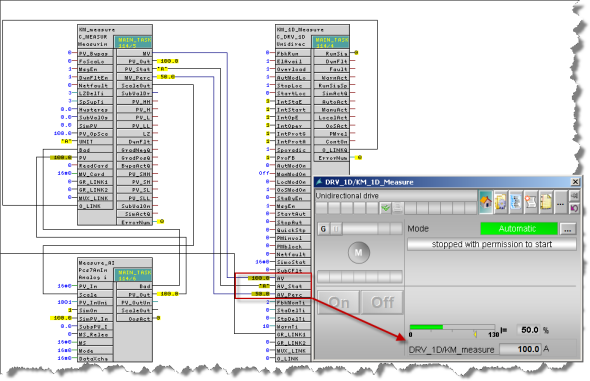
图 3-3 C_DRV_1D块模拟量监控
3.4 连接Simocode电机
在MINAS V8.0中集成了SIMOCOD电机的驱动块C_SIMOS。在安装SIMOCOD的GSD文件后可以配置报文类型为“Basic Type2”,注意输入和输出的起始地址要相同,在C_SIMOS功能块的IO_Addr管脚上输入电机的起始地址。
DRV_1D功能块借助C_SIMOS能够实现对SIMOCOD电机的启停控制,并能监控电机的反馈电流。DRV_1D和C_SIMOS功能块之间的连接如下图:
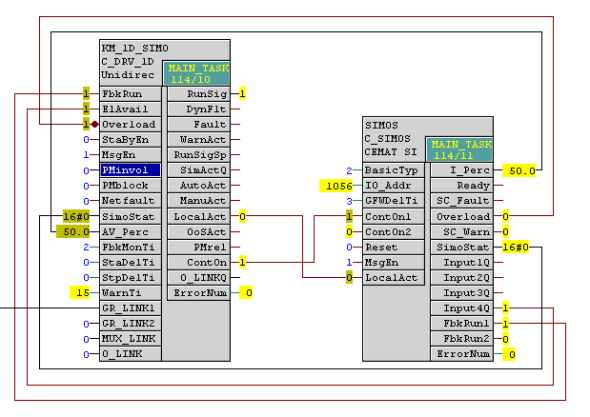
图 3-4 C_DRV_1D与C_SIMOS连接
DVR_1D面板上点击SI可以跳转到 C_SIMOS的面板如下图所示,
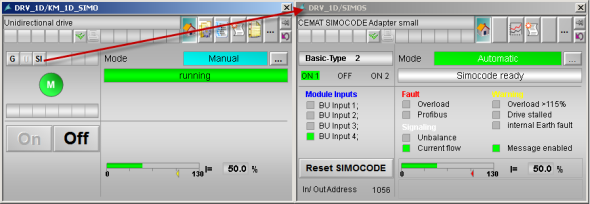
图 3-5 C_DRV_1D与C_SIMOS面板
关键词
CEMAT,MinAs,水泥,驱动器,C_DRV_1D
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc326681.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫