
n
ET200S 1 步进模板使用入门
ET200S 1 5V/204KHz 步进模板入门
1. 模板介绍
1.1 总览
ET200S 1 步进模板输出脉冲来控制步进电机 ,输出脉冲的数量决定步进电机的运动距离,输出脉冲的频率决定步进电机的速度。
模板订货号: 6ES7138-4DC00-0AB0
1.2 模板参数
图. 1: 步进电机模板n
- 1 通道,可控制1个步进电机n
- 数字量输入的参考点开关n
- 外部停止或者外部脉冲使能数字输入n
- 脉冲和方向信号时RS422的差分输出模式n
- 最大输出频率: 204kHZn
- 最大脉冲数: 1048575n
- 4 LED 状态指示灯n
- 2 操作模式:寻找参考点和增量模式
2. 模板接线
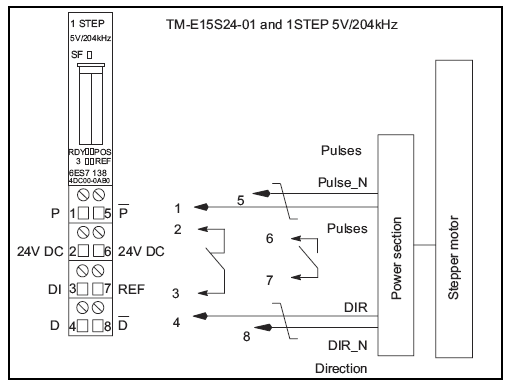
图. 2: 步进模板接线图n
- 端子1和5:脉冲差分信号n
- 端子4和8:差分输出的方向信号n
- 端子2和3:外部停止或者外部脉冲使能数字量输入ID。(功能选择见 4.2)n
- 端子6和7:数字量输入参考点开关
3. 硬件配置
步进模板可以安装在ET 200S接口模板或者 ET200S CPU后面。
本文使用 IM151-7 CPU 为例。
表1: 软件和硬件配置

图. 3: ET200S 站的配置图
4. 硬件和参数设置
4.1 硬件配置
1) 根据图. 2 和图. 3完成ET200S的接线
2) 打开STEP7,创建一个新项目,并插入一个S7-300站
3) 从硬件目录中选择IM151-7 CPU直接拖拽到站配置窗口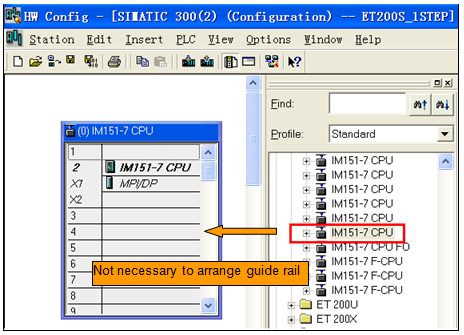
图. 4: 插入IM151-7 CPU
4) 依次在4槽和5槽插入电源模板 PM-E DC24 和步进模块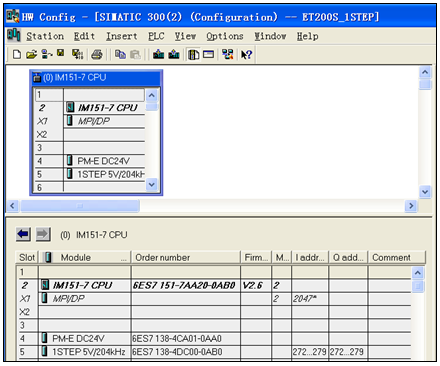
图. 5: 硬件配置
4.2 模板参数配置
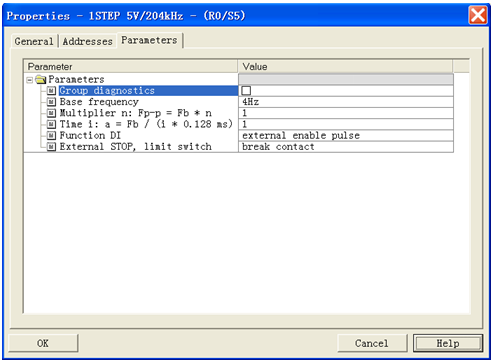
图. 6: 步进模块参数接口
4.2.1 模板参数说明
1) 组诊断:组诊断
2) 基准频率:基准频率,以Hz为单位,标识Fb
3) 增益 n: 增益系数 n,值范围 1-255. 此增益系数决定启动/停止频率 Fss,并且计算公式为: Fss=Fb×n
4) 时间 i: 时间系数 i, 值范围 1-255. 该时间系数以Hz/ms决定加速和减速,计算公式为: a = Fb ×R / (i×0.128 ms)
5)功能 DI: 数字量输入DI 功能可选,可以被组态为外部脉冲输入或者外部停止信号,缺省是外部脉冲且已使能。
6) 外部 Stop, 限位 Stop: 外部 stop, 信号类型停止开关. 接触器触点是常闭信号,以确保该接触器信号,缺省是读取常闭信号。
4.2.2 本文所例参数设置如下
本例参数配置见图. 6.
1) 没有激活组诊断
2) 基准频率 4Hz
3) 乘法系数 1, 启动/停止频率 4Hz
4) 时间系数 1, 加速/ 减速 31.25 Hz/ms
5) 使能外部输入脉冲
6) 外部输入停止和限位信号为常闭类型
5. 编程
5.1 模板输入/输出地址分配
与其它ET200S功能块类似,1STEP步进模板也通过直接读写I/O地址来对模板进行控制和访问的。
反馈信号 (输入), 占用 8 字节. 如表 2 输入地址分配所示。
控制信号 (输出), 占用 8 字节.如表 3 输出地址分配所示。
有关输入和输出变量分配的详细信息请参阅 ET200S 位置控制和操作手册。链接如下:
/cs/document/9260790?caller=view&lc=en-WW

表2: 输入地址分配
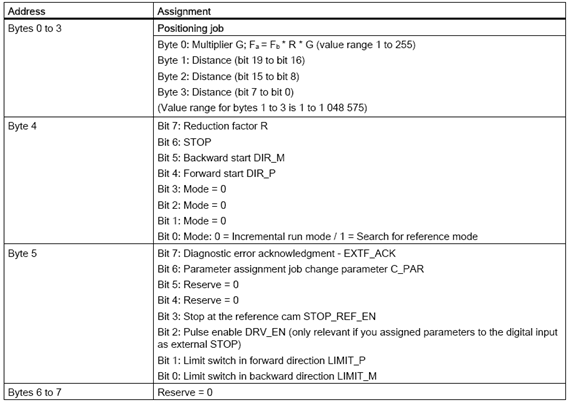
表 3: 输出地址分配n
5.2 项目例程
为了更好的实现按位,字节或字对模板进行读写,在梯形图中使用MOVE指令接收输入数据PIB272-PIB279 到MB10-MB17发送MB20-MB27到PQB272-PQB279,对1STEP模板的读写访问均通过MB地址来进行。
1STEP模板地址分配见图. 5

图. 7: 例程编程
6. 模式描述和举例
6.1 Search-for-reference-point 模式
通过执行search-for-reference-point 模式来同步轴, 即.在机械零位和电气零位之间创建连接关系。
6.1.1 Search-for-reference-point模式
Mode=1
参考点按照常开信号访问
搜寻参考点输出频率 Fss 和 Fa。
Fss 启动停止频率,见章节 4.2.1相关描述。
Fa 输出频率: Fa = Fb ×G × R
Fb: 基准频率. 在1STEP 模板参数中设置。 见章节 4.2.1相关描述。
增益G: 增益系数 G. 值范围: 1-255, 参见模板输出地址字节: 0。
减少R:减少系数 R. 模板输出地址字节4的第7位信号,参见表 3.模板输出地址4.7=0, R=1. 模板输出地址 4.7=0, R=0.1.
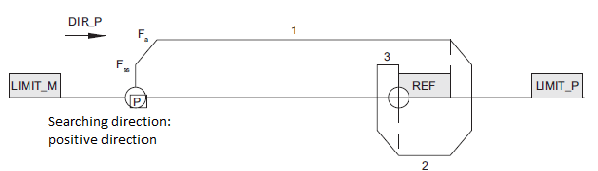
图. 8: 搜寻参考点
6.1.2 search-for-reference-point模式例程
本例模式见图. 8, viz. 搜寻 CW 方向.n
- 通过变量表写输出控制变量:


图. 9: 参考点模式控制变量1) M24.0=1 search-for-reference-point 模式 = 1
2) M25.0=1, M25.1=1: 因为之前的模板参数配置中的限位开关是常闭输入模式,在软件限位信号触发前为信号输入参见章节 4.2.2.
3) M25.2=0: 没有激活软件脉冲使能信号,因之前的模板参数配置中DI已经作为外部脉冲信号使能,内部软件脉冲使能信号在此时不会使用,参见章节 4.2.2.
4) 置位M24.2, 然后复位M24.4 (下降沿有效), 启动search-for-reference-point模式. 输出脉冲频率为 Fa.
5) MB20=1, M24.7=0: 增益系数 G = 1, 减少系数 R = 1, 频率 :
Fa = Fb ×G × R=4Hz×1×1=4Hz。 - 通过变量表读输入状态:

图. 10: 参考点模式变量表1) M15.2=1: 触发外部脉冲使能信号
2) M15.0 = 1: 驱动使能
3) 之后 search-for-reference point启动, M14.0=1 位置被激活, M15.7=1 位置被执行. 等待参考点开关信号 M15.1.
4) M15.1=1: 参考点信号到达, 寻找参考点已完成 M14.4=1,同步操作完成, M14.2=1,位置到达, M15.3=1, 寻找参考点结束。
6.2 增量模式
增量模式是 1STEP 的主要操作模式. 该操作模式可控制步进电机移动按照设定速度移动到一个指定位置。
6.2.1 增量模式描述
Mode=0
输出脉冲的数量决定步进电机的移动距离,最大值脉冲值为 1048575.
输出脉冲频率决定步进电机速度。
在增量模式下输出频率: Fss, Fa
方向信号作为启动信号。
注意: 步进电机实际位移取决于脉冲数实际速度取决于脉冲频率,这不是在1STEP模板中设置的。
6.2.2 增量模式例程
- 通过变量表写输出控制信号:

图. 11: 在增量模式下的控制变量1) M24.0=0 增量模式 = 0
2) M25.0=1、M25.1=1: 因之前的已经配置中限位开关信号为常闭输入模式,在软件限位信号触发前为信号输入参见章节 4.2.2。
3) MB20=1, M24.7=0:增益系数 G = 1, 减少系数 R = 1, 输出频率Fa
Fa = Fb ×G × R=4Hz×1×1=4Hz.
4) 脉冲输出数: 通过MB21-23的20 个位信号来存储脉冲数,最大值为 0xFFFFF=1048575
MB21 输出脉冲数 (位 16 到位19)
MB22输出脉冲数 (位 8 到位15)
MB23输出脉冲数 (位 0 到位 7)
MB21的位20 到位 23 没有使用
本例中,分配的值为 0 x 100,即. 256 个脉冲。
5) 置位 M24.4, 之后复位 M24.4 (下降沿有效),启动增量模式 触发CW方向信号开始运动。 - 通过变量表读输入信号:

图. 12: 增量模式变量表1)增量模式启动后,M14.0=1位置任务被激活,M15.7=1位置被执行。
2) MD10 显示剩余脉冲,如图. 12, 220 个脉冲尚未发出。
3) MD10=0: 脉冲发送完成, 置位 M14.0 和M15.7, 位置到达 M14.2=1. 增量模式输出完成。
本文介绍步进模板 ET200S 1STEP 的基本操作。有关该模板操作,诊断和技术参数的详细信息, 请参阅手册 "ET 200S 位置操作指令". 该手册可通过此链接下载:
/cs/document/9260790?caller=view&lc=en-WW
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc326540.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫