
怎样计算SINAMICS V90电子齿轮比呢?
术语
编码器分辨率:
根据实际的编码器决定了电机转一圈的脉冲个数。
对于V90而言其伺服电机存在两种编码器类型:
- 增量型编码器
- 绝对型编码器。
其分辨率如下表所示:
| 类型 | 规格 | 分辨率 (ppr) | |
|---|---|---|---|
| A | 增量型编码器 | 2500 | 10 000 |
| L | 绝对型编码器 | 20位 | 1 048 576 |
表 01:SINAMICS V90 伺服电机编码器的分辨率
每转脉冲数 (ppr):
使电机转一圈则上级控制器需要发出的脉冲数
长度当量 (lu):
在一个设定值脉冲内,负载部件移动的最小运行距离。
设置和计算SINAMICS V90的电子齿轮比
通过两种方式设置电子齿轮比:
- 电子齿轮比 = 编码器分辨率/P29011。 P29011 是电机转一圈需要的脉冲数
- 当P29011=0, 电子齿轮比 = P29012/P29013
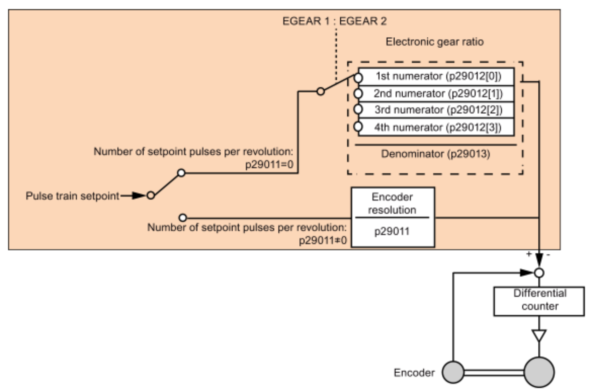
图 01: 设置电子齿轮比的方式
电子齿轮比是用于脉冲设定值倍乘系数。 通过分子和分母实现。 四个分子(p29012[0],p29012[1],p29012[2], p29012[3])和一个分母(p29013)用于四个电子齿轮比:
| 参数 | 范围 | 出厂设置 | 单位 | 描述 |
|---|---|---|---|---|
| p29012[0] | 1至 10000 | 1 | - | 电子齿轮比的第一个分子 |
| p29012[1] | 1至 10000 | 1 | - | 电子齿轮比的第二个分子 |
| p29012[2] | 1至 10000 | 1 | - | 电子齿轮比的第三个分子 |
| p29012[3] | 1至 10000 | 1 | - | 电子齿轮比的第四个分子 |
| p29013 | 1至 10000 | 1 | - | 电子齿轮比的分母 |
表 02: p29012[0-3] 和 p29013
这四个电子齿轮比可通过数字量输入信号 EGEAR1 和 EGEAR2 选择组合。
| EGEAR2 : EGEAR1 | 电子齿轮比 | 比值 |
|---|---|---|
| 0:0 | 电子齿轮比1 | p29012[0] : p29013 |
| 0:1 | 电子齿轮比2 | p29012[1] : p29013 |
| 1:0 | 电子齿轮比3 | p29012[2] : p29013 |
| 1:1 | 电子齿轮比4 | p29012[3] : p29013 |
表 03:数字量输入信号EGEAR1 和 EGEAR2组合
说明
- 电子齿轮比的取值范围是 0.02 至 200。
- 仅可在伺服关闭状态下设置电子齿轮比。
电子齿轮比的计算公式

图 02:电子齿轮比的计算公式
电机转一圈的脉冲数 d: d=c/(LU*i)
电子齿轮比: a/b=P29012/P29013=r/d=r/(c/(LU*i))
a/b:电子齿轮比
LU:长度当量
r:编码器的分辨率
i=n/m:减速齿轮比
c:滚珠丝杠的节距
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc325825.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫