
如何实现运行到固定停止点?
通过数字量输入实现
在固定停止点设定参考点
在速度模式下SINAMICS V90以一个减小的扭矩限幅值向固定停止点运行。当到达固定停止点后, 驱动器将数字量输出扭矩限幅到达(TLR)位置位。 当控制模式切换到内部位置控制模式(IPOS)后,通过数字量输入REF来设定参考点。
参数设置
SINAMICS V90工作在IPOS/S复合控制模式。

在P29050[1] 里设置正向扭矩限幅值(例如50%),在P29051[1] 里设置反向扭矩限幅值(例如-50%)。

以下PLC和V90信号间的时序图展示了此功能的实现:
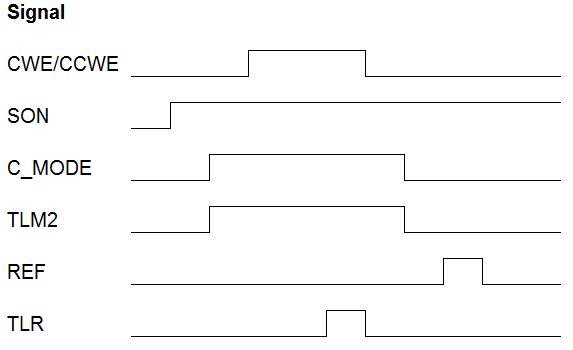
说明
可以将数字量信号TLIM2与C_MODE信号桥接来节省一个PLC开关量信号。
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc324315.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫