
即使未连接驱动时,也能将真实轴切换到模拟状态。模拟状态显示在分配驱动和编码器时轴的配置对话框中。
这样,轴的基本功能(如设置使能、执行运动控制指令)可用于用户程序,而无需向所连接或缺失的驱动输出调节量。
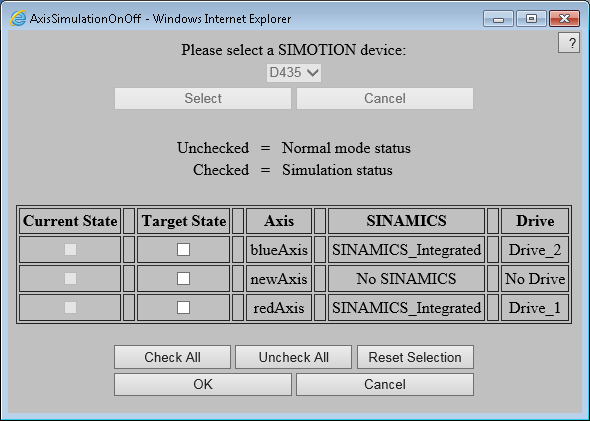
以下脚本可实现真实轴模拟状态与正常运行状态的自动切换。该功能在进行真实轴功能测试时十分有用。此外也支持还未分配给驱动对象的轴。
详情请见脚本代码以及运动控制功能手册 – 章节 3.4.9 “设置为无驱动真实轴(轴模拟)” 中的 “电气/液压 TO 轴,外部编码器”(109476542)。
提示
- 自脚本版本 V1.2.2 起,脚本也支持带有连接在 CX32-2 上的驱动并配置了 Drive Safety 数据块的轴的模拟。
对于 SCOUT V4.4 以下版本,可继续下载脚本版本 V1.1.2。 - 脚本会为每个设备在项目目录下生成一个带有设备所有真实轴的相关数据的文件,用于从模拟状态切换回正常运行状态。
注意
- 模拟生效时,无法使用 SIMOTION 工艺数据块、扩展安全功能以及驱动安全数据块。
- 脚本无法在 SIMOTION SCOUT TIA 环境下使用。
下载
- 激活/取消真实轴的模拟模式 - 脚本版本 V1.2.3 (04/2016):

 AxisSimulationOnOff_V1_2_3.txt (145.8 KB)
AxisSimulationOnOff_V1_2_3.txt (145.8 KB) - 激活/取消真实轴的模拟模式 - 脚本版本 V1.1.2 (07/2014)
适用于 SCOUT V4.4 以下版本:AxisSimulationOnOff_V1_1_2.txt (97.1 KB)
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc322353.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫