
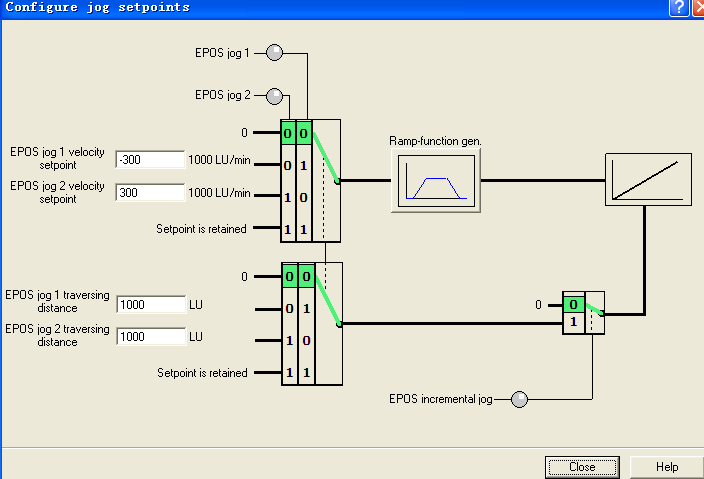
如下图,我对jog1,jog2速度的理解是一个正方向,一个负方向的最大速度,不知道理解的对不对。关于jog1,jog2,只知道在速度模式时无效,在位置模式时有效,可相对行程是什么意思呢?希望能有高手解惑。另外那个EPOS是什么意思呢??
问题补充:
EPOS jog 1 velocity, EPOS jog 2 velocity是速度设置,为什有两个? EPOS jog 1 tranversing distance, EPOS jog 2 tranversing distance设置的相对行程是什么意思呢?只知道这个相对行程在速度模式下无效,在位置模式下有效,求解
图片说明:
最佳答案
1.jog1,jog2是两个独立的点动功能,其速度值可设定正值也可以设定为负值,根据现场应用情况来设置,只不过出厂值jog1为-300LU/min,jog2为300LU/min,设定范围(-40000000-40000000)。
2.点动两种模式:速度模式和位置模式。jogging incremental无效(即P2591=0),点动功能工作在速度模式下,jogging incremental有效(即P2591=1),点动功能工作在位置模式下,可根据实际应用设置点动相对位置值 tranversing distance(设定范围0- 2147482648LU)。
3.EPOS是指基本定位器。
提问者对于答案的评价:
谢谢。不过我想知道关键的一点,为什么有两个速度设置,如果JOG1,JOG2是两个独立的点动控制,那么我用的是哪个呢?
专家置评
已阅,最佳答案正确。
原创文章,作者:more0621,如若转载,请注明出处:https://www.zhaoplc.com/plc179819.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 